当地时间12月21日晚,美国旧金山出现了一起大规模停电事件。
但谁承想,停电影响13万居民日常生活也就罢了,居然还能导致全市交通中断!
随着红绿灯彻底熄灭,只见一辆辆Waymo旗下的Robotaxi无人驾驶出租车成片趴窝,直接给路口围了个水泄不通。

更要命的是,车上根本没有安全员……
这也就意味着,它们根本没法凭一己之力把车挪到安全地带,只能等后台安全员一个个远程操作,或是等人到现场施救。
而来救它们的人,又会被另一批Robotaxi堵在下一个路口。
在当地,无人驾驶和Robotaxi本就备受争议。这种关键时刻掉链子的操作无异于雪上加霜,进一步损失了一大波路人缘。
这时,一直瞧不上Waymo的马斯克火速下场,来了个落井下石:
停电,可没有影响特斯拉的Robotaxi业务哦。

趴窝的Waymo和畅通无阻的特斯拉,形成了鲜明的对比——那句话怎么说的来着,“全靠同行衬托”。
正因如此,有美国网友表示:如果我是Waymo,干脆收工算了!接下来肯定是特斯拉一统自动驾驶江湖,还混个什么劲儿啊!

但同样地,也有人并不接受“特斯拉没趴窝=FSD技术更先进”的逻辑。
毕竟自动驾驶要考虑的场景,那可太多了。如果要公平客观地评判,肯定要综合各种复杂场景下的应对策略,停电只不过是其中一种而已。

但不管怎么说,Waymo的Robotaxi存在不足和漏洞,是板上钉钉的事实。

咱们先来说说Waymo为啥会在路口集体趴窝。
Waymo Drive作为一步到位的L4自动驾驶系统,是典型的“重地图、重规则”流派。
它的运行流程,也是绘制高精地图——多冗余系统下感知实时信息——根据已有规则做出预测——规划并执行路线行驶。
经过超1亿英里真实道路数据的锤炼,Waymo Drive可以说已经进化得比较成熟了。
就比如,这次停电事件中,有网友质疑Waymo无法理解最基本的道路规则,才在路口“不知所措”,这么说其实有失偏颇。
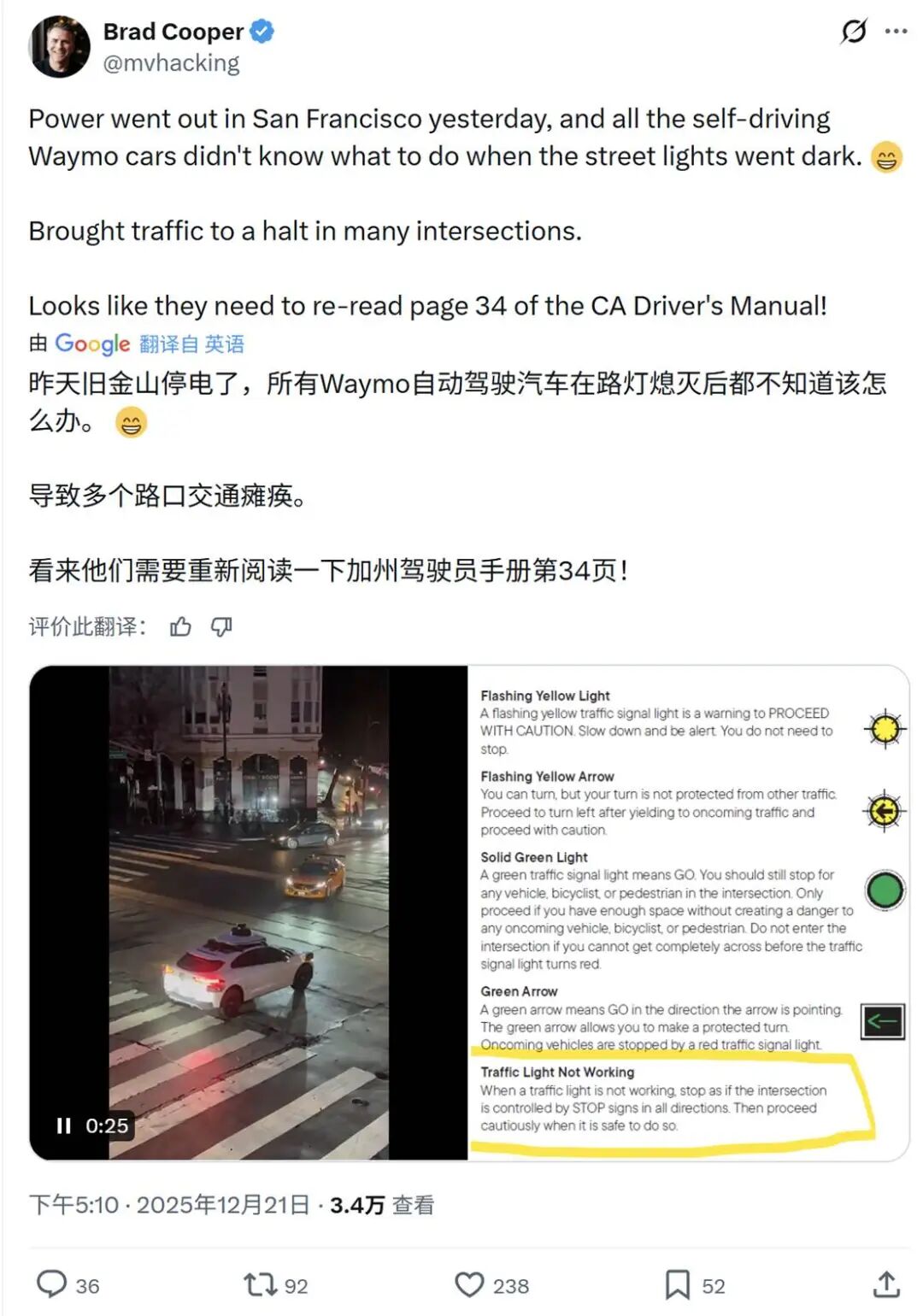
正如圈出来的法规所言,当交通信号灯无法正常运行时,所有方向都必须先停车,确认安全后才能通行。
这也是很多人提到的美国“四向停车”规则,具体通行顺序稍微有点复杂——
先到的先走,直行/右转车辆要比左转车辆先走。如果四向车辆同时到达、且均需左转,靠司机的手势和眼神,或者其他人与人之间的交流方式协调通行。
该项规则,Waymo Drive是学了的,只不过没应对好。

这就好比,学生在上课时学习了一道公式,结果考试考得是这道公式衍生出来的复杂阵列,解题难度瞬间激增。
Waymo发言人,也差不多是这么解释的:
虽然技术上车辆能够应对信号灯故障,但“公用事业基础设施的重大故障”叠加由此引发的交通混乱,导致车辆为了安全起见,停留时间过长。
翻译一下就是,当天晚上的旧金山,堪比黑暗森林的大型博弈现场。按照先停车、后视情况通行的原则,Waymo停在了路口,但迟迟无法确认道路可以100%安全通过,所以只能按兵不动。
这在外界看来,就是Waymo宕机了。
好巧不巧,由于“宕机”的车辆激增,云端的远程操作员只能协助处理一部分,处理速度根本赶不上新宕机的数量。再加上停电导致断网,这才让道路被彻底堵死。

而马斯克的“拉踩”,也是真的有底气。
据评论区的网友分享,哪怕停电了,特斯拉的FSD也不会对着一个没有信号灯的路口宕机,水平甚至能追平甚至赶超“最优秀的人类司机”。

这就有意思了。
要知道,最早开始测试Robotaxi的Waymo,一直以来都被视为全球L4领域的领头羊,技术实力稳坐头把交椅。
而特斯拉到了今年6月份,才正式开启试点运营Robotaxi,目前仅在美国德州奥斯汀的部分运营区域取消了安全员,在Robotaxi领域是妥妥的后来者。
怎么在停电这种极端场景中,Waymo的表现还不如特斯拉呢?

这背后的根本原因,社长认为主要有两点。
一方面,是Waymo海量路测里程中的数据缺陷。
或者不客气一点说,是采集数据过程中的逻辑缺陷。
Waymo积累的里程数据有两种,一种是模拟行驶数据,就是在电脑里生成许多个能模拟现实路况的虚拟世界,让Robotaxi在里面锻炼应对能力;
另一种则是真实道路的运营里程,累计超1亿英里,并且这个数字还在随着每周45万单的Robotaxi业务迅速增加。
理论上来讲,Waymo可以将在真实道路上遇到的极端场景,放在模拟环境中反复练习测试,直至找到最优处理方式后,再应用到真实世界中。

但Waymo以往积累的所有数据,都是建立在城市交通信号没有中断、交通秩序能基本维持的前提下。
比如丧尸来了、空袭枪战、或者是这次的停电导致信号灯中断,压根不在Waymo的考虑范围之内。
所以一旦规则不好使了、连人类司机都得靠眼神和手势沟通博弈,定位L4的Waymo为了100%安全,必然会禁止在混乱中主动参与博弈,宕机也就成了必然。

另一方面,是Waymo与特斯拉在自动驾驶技术路线上的不同。
Waymo的选择,是配备激光雷达的多感知融合方案。
它并没有完全押注端到端大模型,而是采用世界模型结合端到端学习的混合设计,目的就是为了能更有力地提供安全兜底能力。

特斯拉的路线大家就比较熟悉了:坚定支持纯视觉方案。并且自打FSD V12版本以来,特斯拉就是将端到端大模型引入自动驾驶路线的头号玩家。
关于多感知融合方案和纯视觉方案,最大的区别不是有没有激光雷达,而是背后的感知算法逻辑。
多了激光雷达(和毫米波雷达),意味着更多的感知来源,和更高级别的保障。
但这时,会对算法和算力提出更高的要求——
一个极端的例子是,激光雷达告诉你前面有个巨大的透明塑料袋,你需要刹车;但摄像头依然能看清前面的路,告诉你可以继续开。
人类司机当然能通过经验自行处理。但当数据冲突的时候,算法到底该相信谁?更何况算力如果不够,等系统从犹豫中反应过来,车辆已经来不及操作了。
因此,所有做L4自动驾驶的公司,都要在算法和算力上下大工夫。
从这个角度出发,特斯拉的纯视觉路线要处理的感知信息更少,决策过程更简单。
FSD的端到端大模型,可以在不依赖高精地图和代码规则的情况下,通过摄像头传来的信息随机应变,做出比人类驾驶员更优秀的应对方案——
哪怕这一场景,不曾模拟训练过。
不过,经过这一番停电大考,Waymo也算是狠狠长了一回教训。
12月23日,Waymo宣布更新Robotaxi的自动驾驶系统,以提升应对停电场景的能力。此外,Waymo还表示将吸取这次停电事件的经验,从而改进紧急响应协议。

不得不说,Waymo这次虽然在全世界面前现了眼,但也收集到了极端场景下的宝贵数据,还是有收获的。
只不过,这收获的代价属实有点大。
写在最后
马斯克对Waymo的反唇相讥,其实也反映出Robotaxi赛道竞争的白热化。
目前,Waymo的Robotaxi车队数量为2500辆,在美国5个大城市展开运营。
到了明年,Waymo计划进一步扩张,再新增12个运营城市,其中还包括首个出海城市英国伦敦;还会新增其他12座测试城市,为后续运营提前铺路。
而特斯拉无需安全员的“真·无人车”,也会随着Cybercab量产,从德州奥斯汀的约150辆,提升到明年预计的1000辆。
毕竟在马斯克眼里,自动驾驶是特斯拉未来最重要的增长来源之一,也必然会成为马斯克多项工作中的重中之重。

本次旧金山停电事件,其实对Waymo和特斯拉双方都提了个醒:必须重视平时很难遇到,但一旦出现,就会产生巨大社会影响的极端场景。
对于Waymo这类L4自动驾驶公司来说,激进(效率)与保守(安全)之间的平衡,会更加难以把握。

社长相信在不少人眼里,都希望Robotaxi在道路通畅的时候能够遵守交规,确保安全;但到了路况糟糕的时候,又希望它能耍点“小聪明”绕开规则,效率优先。
然而,既想要Robotaxi精准读懂人类每一次的驾驶偏好,又想让它和道路上各类交通参与者的博弈中取得胜利……这和“让人类永远保持理智”一样,是一种奢望。
至于想要彻底消灭交通事故,或许,只能期待一下车路协同下的全自动交通?
但无论如何,从L2渐进式实现L4,与一步到位实现L4的路线之争,似乎开始要有眉目了。