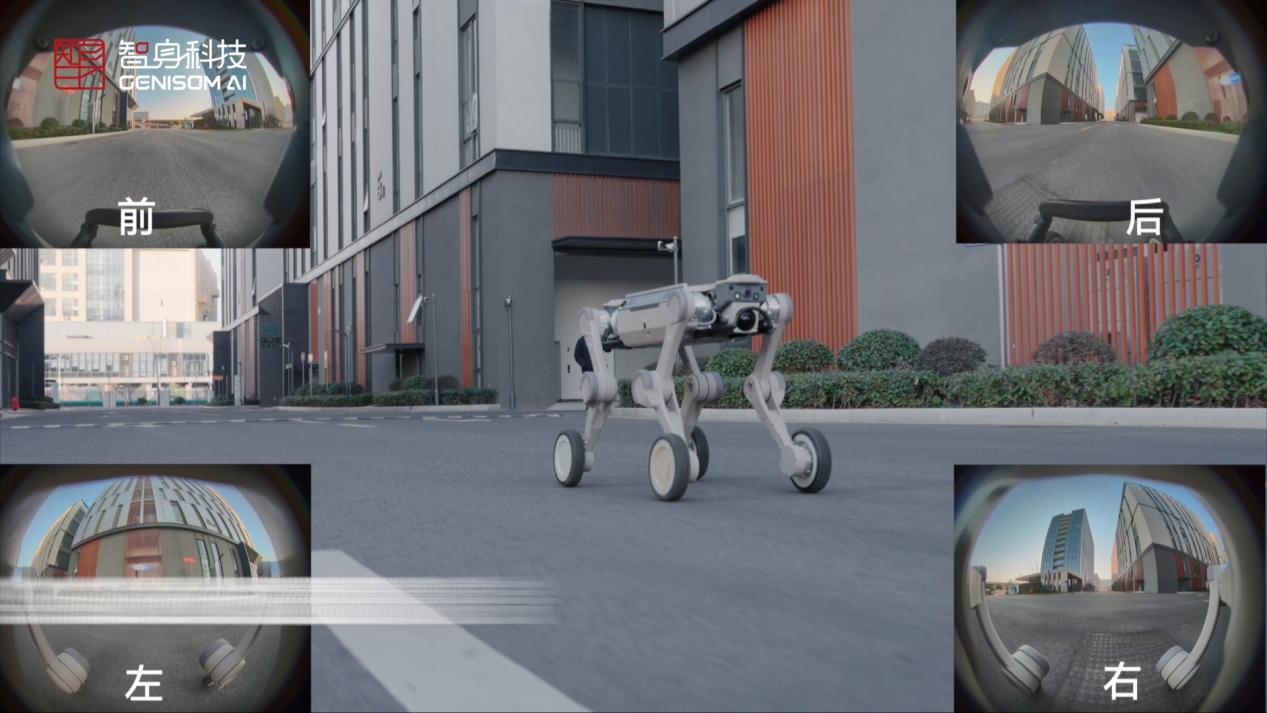
春节前夕,智身科技预发布了一段展示视频。画面中,其中型四足机器狗铜锤M1在真实环境中穿梭,绕过散落的障碍物,穿过狭窄通道,完成了一系列自主移动动作。这家刚刚在2026年开年完成数亿元融资的企业,又一次完成了科技零的突破。
将原本属于汽车的高阶自动驾驶技术引入四足机器人,是这次预发布的核心看点。铜锤M1搭载的“环视智驾系统”由两大技术模块构成:环视全景影像和BEV视角下的OCC占用网络。

这套技术组合在汽车领域是实现高阶自动驾驶的核心架构,智身科技将其跨界引入地面移动机器人,试图在环境感知维度重新定义机器人的能力边界。对比汽车而言,目前这套环视系统已经让机器狗在实际应用层具备“L2+”级别的智驾能力。
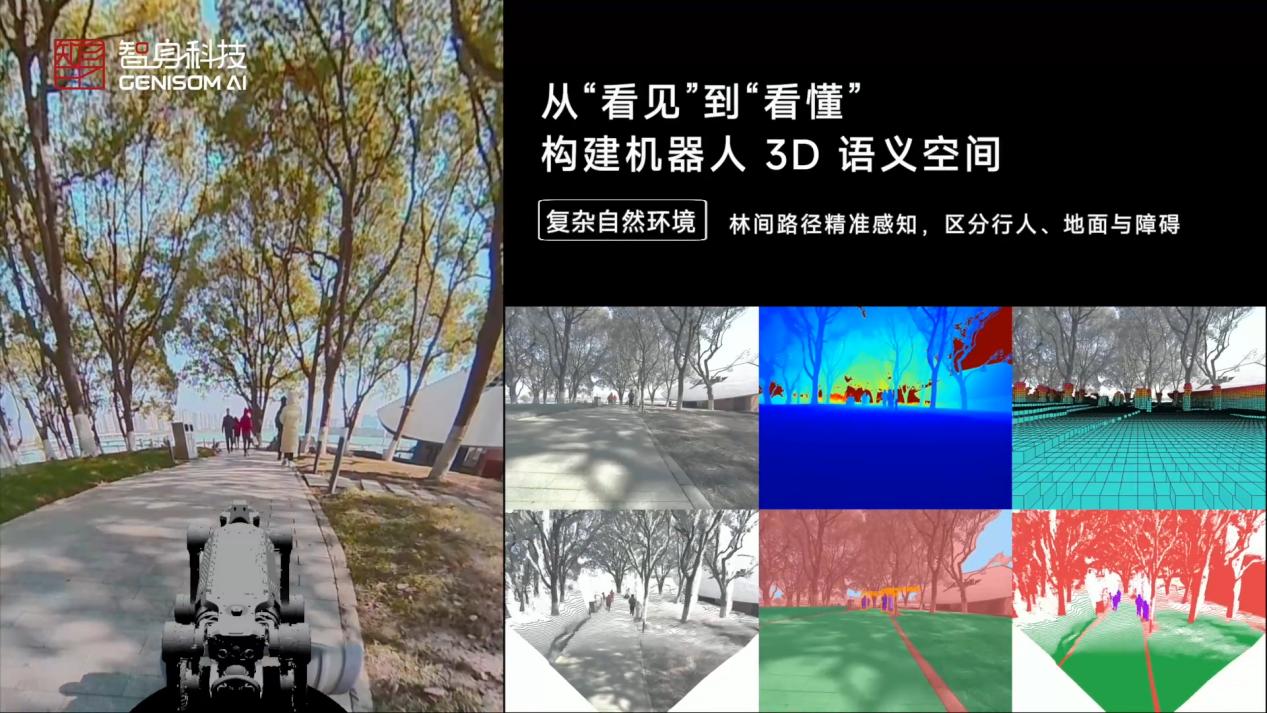
从“看见”到“看懂”的感知跃迁
铜锤M1的环视智驾系统,其技术实现可分为三层:
感知层,四路超广角鱼眼摄像头覆盖机器人周身360°视野,通过联合标定和畸变校正,将多路2D图像投影至统一的鸟瞰视角空间。与传统拼接方案不同,铜锤M1的碗状三维模型对四路鱼眼相机的融合,采用GPU加速技术,保证了效果和效率。消除广角镜头带来的透视畸变,生成以机器狗为中心的连续三维环境模型。这一过程解决了足式机器人最棘手的侧后方盲区问题,为后续决策提供完整的空间输入。
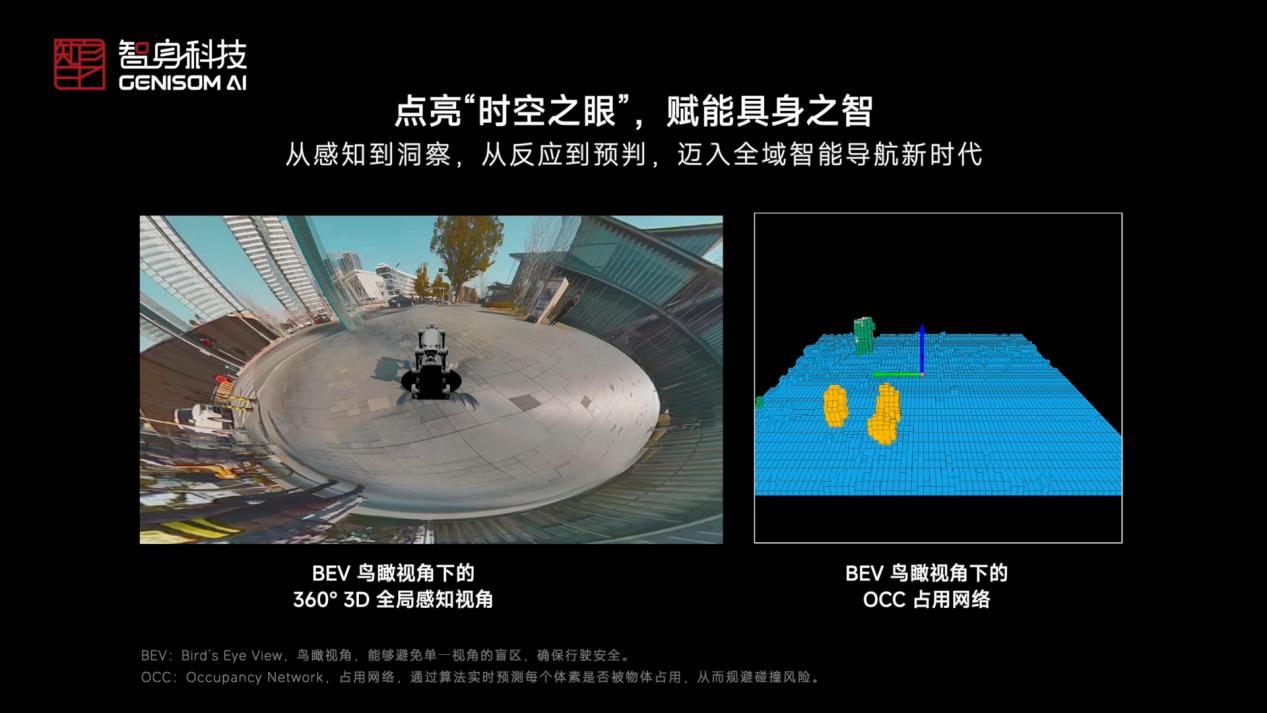
理解层,Occupancy占用网络将三维空间离散化为密集的体素网格,每个网格被独立预测是否被物理实体占据。与传统目标检测的“识别-规避”逻辑不同,Occ网络不依赖预训练物体类别,仅通过几何特征判断可通行性。这意味着铜锤M1能够识别从未见过的异形障碍物——工地散落的钢筋、变电站地上的扳手、废墟中的扭曲杂物——只要物理存在,就会被标记为占用区域。Occupancy不依赖白名单,能够检测出各种异形的障碍物,这对机器人在感知环境中非常必要。
决策层,强化学习运动模型将感知输出的空间占据信息转化为足式运动指令。铜锤M1自研的高功率密度无框力矩电机和机电一体化关节模组,支持整机在极限工况下的动态响应。结合前后配置的视觉、激光、超声、惯导模块,机器狗具备抗冲击、抗扰动、跌倒自恢复能力,可自主应对复杂地形。

全景影像与BEV视角下的OCC的协同机制在于:全景影像为占用网络提供高质量、多视角的输入数据,而占用网络则赋予全景影像以深刻的空间语义理解能力。前者是“眼睛”,负责采集和呈现;后者是“大脑”,负责解析和判断。两者共同构成机器狗在动态、未知环境中“看得全、看得懂、走得稳”的技术底座。
从硬件支撑看,铜锤M1实现了接近1:1的负载自重比,这是行业内首个达到这一指标的中型四足机器人产品。轻量化高强度材料与结构优化,搭配自研动力系统,让30公斤的机身能够承载相当重量的任务载荷。双电池设计支持热插拔快拆快换,配合自主充电能力,确保连续作业不停机;IP67防护等级和-20℃~55℃的工作温度范围,使其能够适应极端环境。
这套技术架构将汽车行业已验证的BEV+OCC感知范式,首次完整移植到足式机器人平台,意味着机器狗的环境理解能力有望达到汽车智驾级标准。
在智身科技的定义中,机器狗智能驾驶跟智能汽车一样,拥有了五个不同的阶段与标准:
L1-单一功能自动化
目标跟踪,信标跟随
L2-部分自动化
基础场景建图导航需要人工干预。目前行业普遍水平,需人工监控,处理简单障碍。
L3-限定条件自动化
跨层3D导航极少人工干预。在已知场景(工厂、社区)自主规划路径,仅在极少数情况需要人工介入。
L4-高度自动化
特定区域内自动巡检,无需人工干预。实现特定场景(如安防联动)下的完全闭环。
L5-全自动化
自由移动,自主进化。
技术路线从发散走向收敛 行业进入商业化关键阶段
铜锤M1的技术路径选择,折射出四足机器人行业当前的发展阶段。有行业研报指出,机器狗的技术路线正从发散走向收敛,软硬件技术相对成熟,行业已进入商业化应用阶段。在政策和资本支持下,国内布局四足机器人的企业已达50余家,国产品牌在全球市场占据主导地位。
从应用场景看,四足机器人的落地路径日益清晰。工业领域正逐渐成为替代人工巡检的重要技术路径,在变电站、管廊、电缆隧道、化工装置等场景已形成成熟应用案例;应急救援领域正从技术验证走向实战化,在消防救援演练、化工事故侦察等场景实现实装使用;消费市场则处于从“小众尝鲜”向普及过渡的关键阶段,产品价格持续下探,功能逐渐丰富。
IDC预测,2026年中国四足机器人市场规模将超7亿美元,同比实现翻倍增长。市场呈现消费级与行业级“双轮驱动”特征:消费端以陪伴互动和情绪价值为核心,融合大模型技术强化交互体验;行业端侧重实用性能与可靠性,在巡检、安防、应急救援等复杂环境中发挥价值。
智身科技此次新技术的发布,恰好卡在行业从技术验证向规模化应用转型的时间节点。智身科技选择将汽车智驾技术引入四足机器人,本质上是将汽车行业已验证的感知架构,移植到地形适应性更强的足式机器人平台,试图在“环境理解能力”这一维度建立差异化优势。
市场竞争格局分化 特种场景成差异化突破口
四足机器人赛道正呈现分化态势。宇树科技在教育娱乐科研领域深耕,云深处科技侧重电力巡检等轻量应用,而部分新锐企业则聚焦特种工业场景,在防磁、防爆、防水、防冻等细分领域构建壁垒。
这种分化背后是市场需求的多元化。工业场景对机器人的要求与消费场景截然不同:前者需要高可靠性、强环境适应性、长续航和模块化上装能力;后者更看重交互体验、内容服务和情绪价值。随着应用场景复杂度提升,行业竞争格局加速分化——垂直赛道厂商聚焦细分领域,凭借场景深耕能力形成专业优势;头部综合型厂商则依托品牌影响力和供应链整合能力推进产品线横向扩张。

智身科技的选择是跨界引入智驾技术。BEV+OCC的组合在汽车行业已被验证能够应对复杂交通场景中的遮挡、异形障碍物等难题,将其引入足式机器人,意味着机器狗的环境理解能力有望达到汽车智驾级标准。这套技术路径能否在工业巡检、应急救援等场景中形成实质性效率优势,还需要更多落地案例来验证。
从产业协作角度看,四足机器人的发展正从单机智能向系统级协同演进。机器狗的价值不仅在于自身能力,更在于能否融入更大的作业系统。智身科技在酒泉卫星发射中心的电力巡检任务、消防领域的空地协同演练,正是这种系统级能力的体现。
写在最后:
四足机器人行业正站在从技术突破向规模化应用转型的门槛上。机器狗产业放量在即,中长期市场空间值得期待。
智身科技的铜锤M1环视版预发布,是这场竞赛中的一个节点。汽车级的智驾技术开始在四足机器人身上落地,行业竞争的核心变量正在从“能不能跑”转向“看得懂、走得稳”。而真正决定胜负的,将是技术能力与场景需求的匹配程度,以及在真实作业环境中持续交付的能力。
而智身科技,这一次走在了行业前列!

![小米真是哪个行业都想强饭吃,机器人也没落下[捂脸哭]](http://image.uczzd.cn/17267168200936134535.jpg?id=0)

