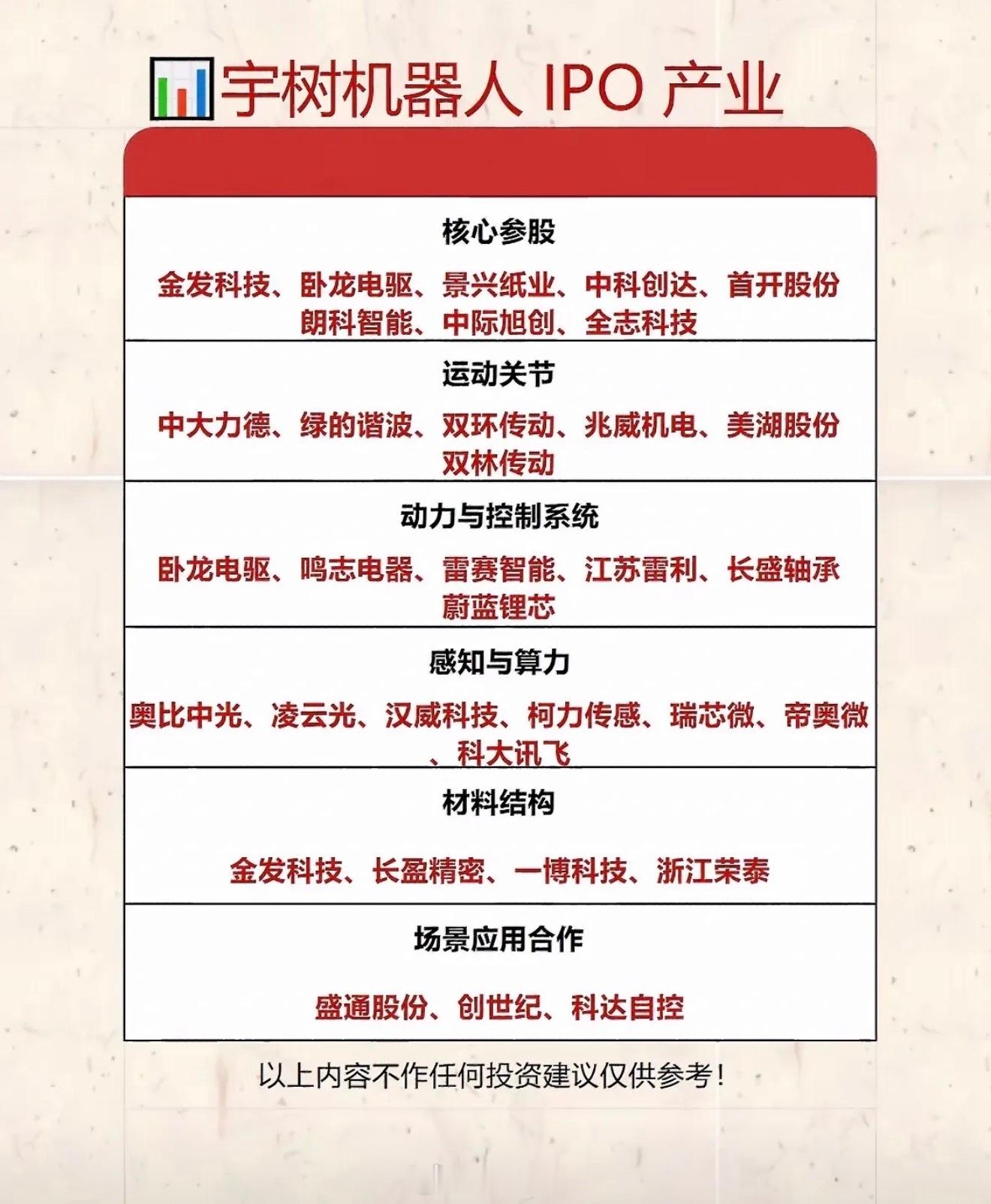
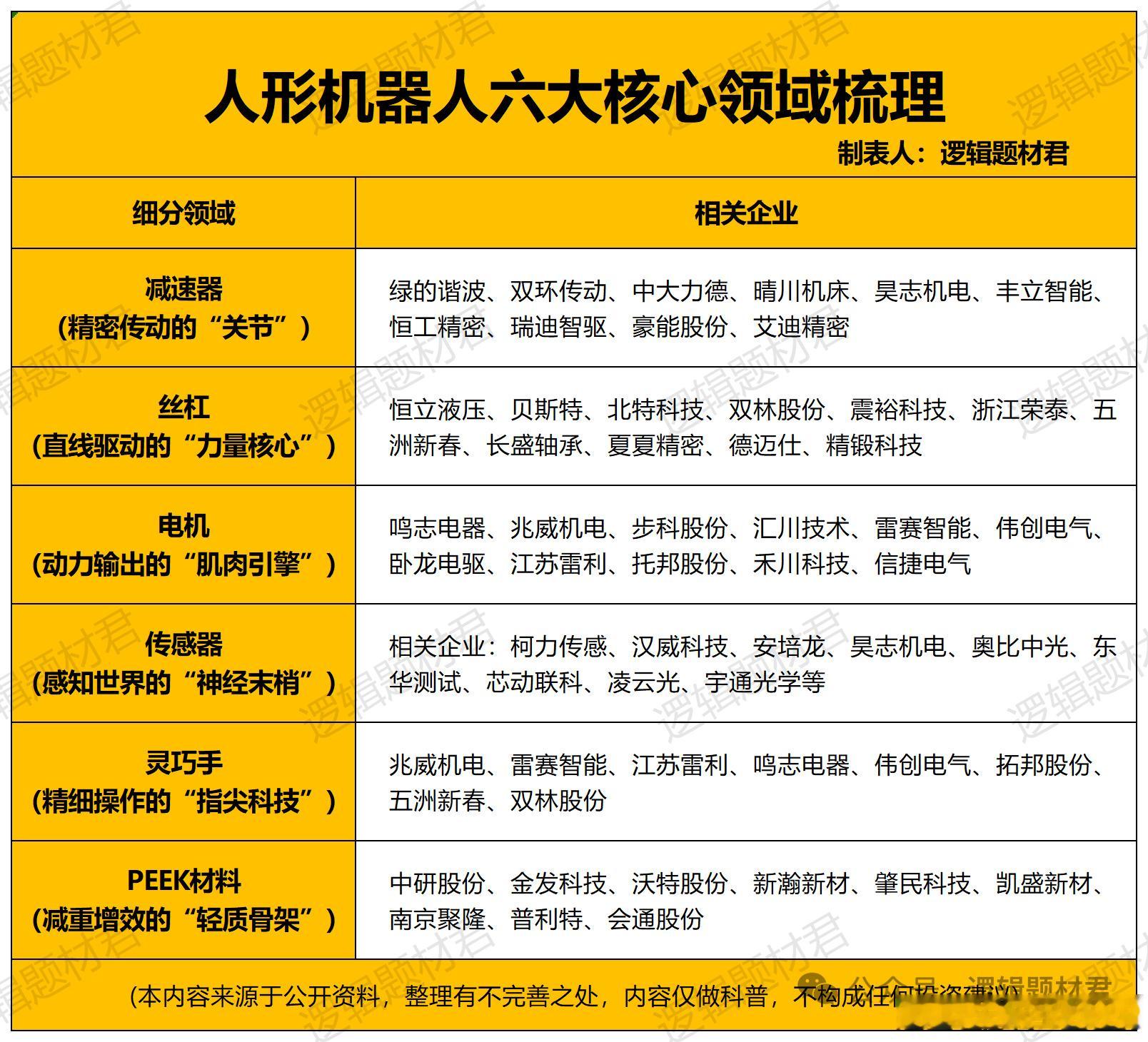
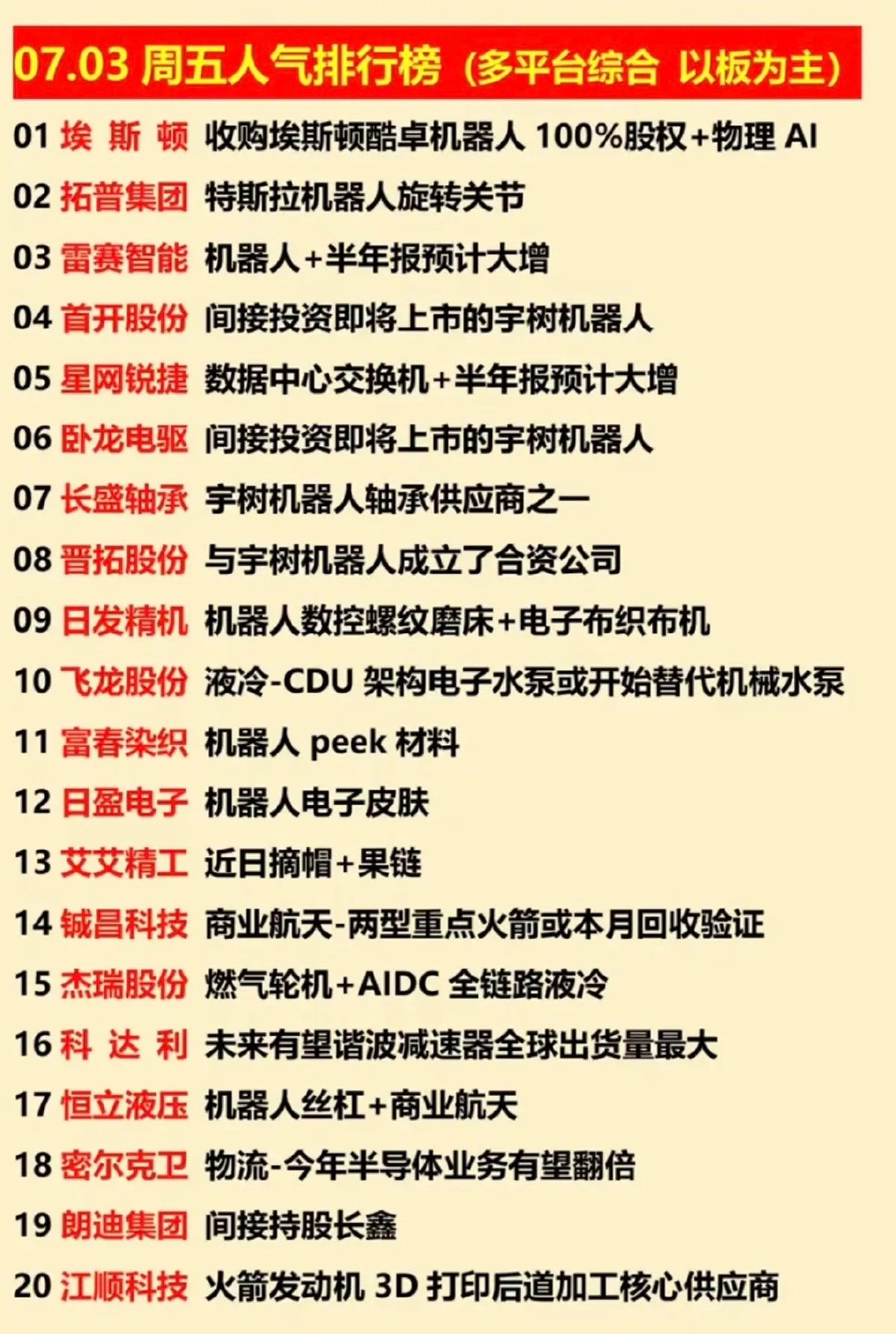
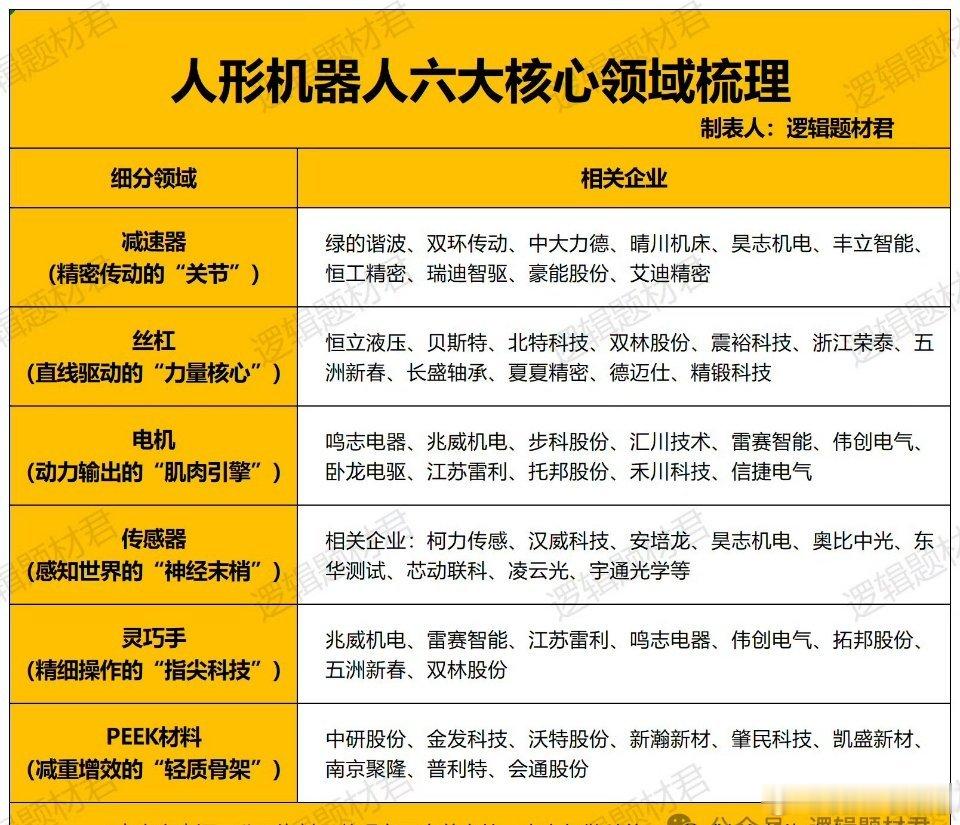
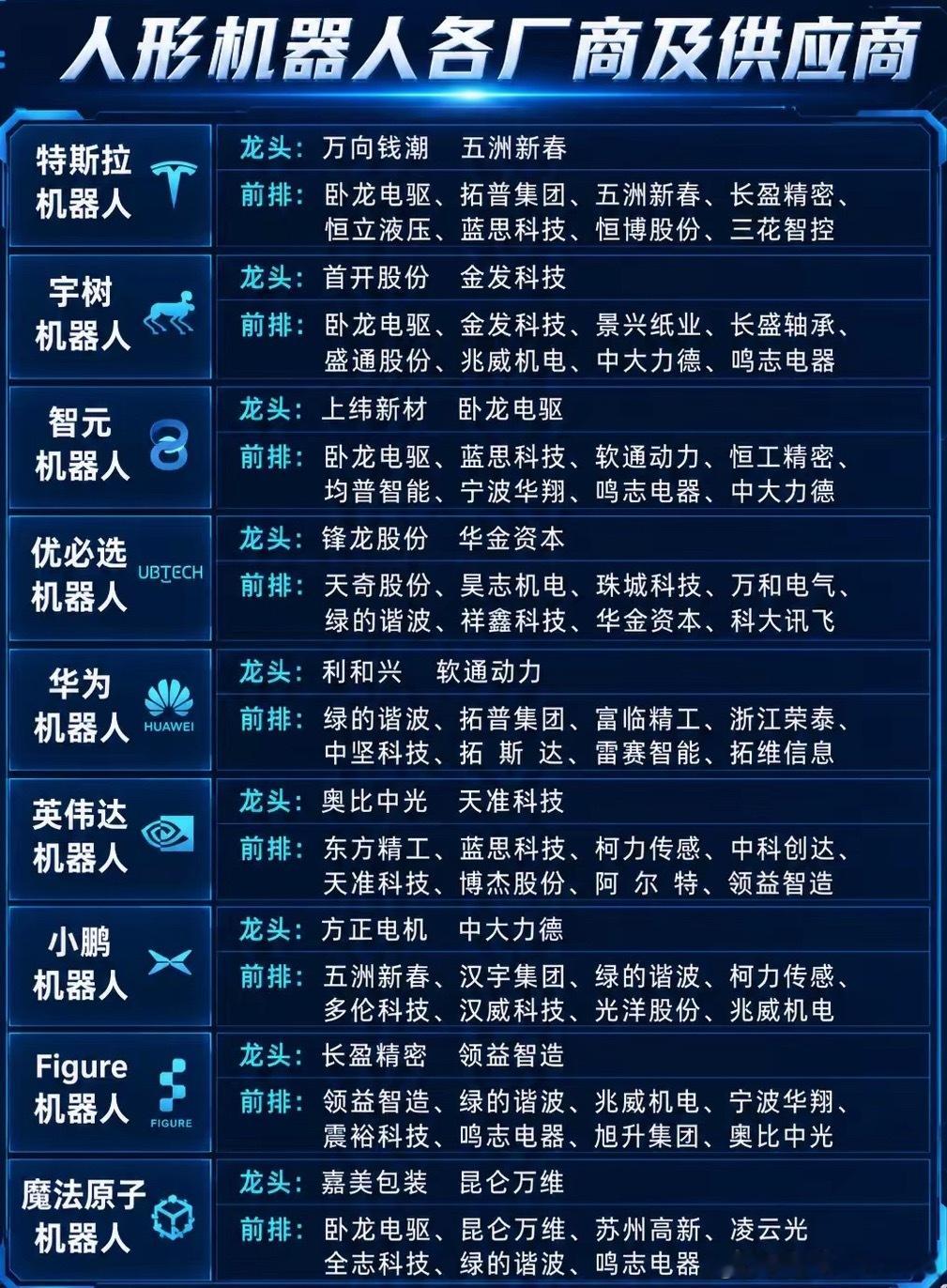
标签: 人形机器人
























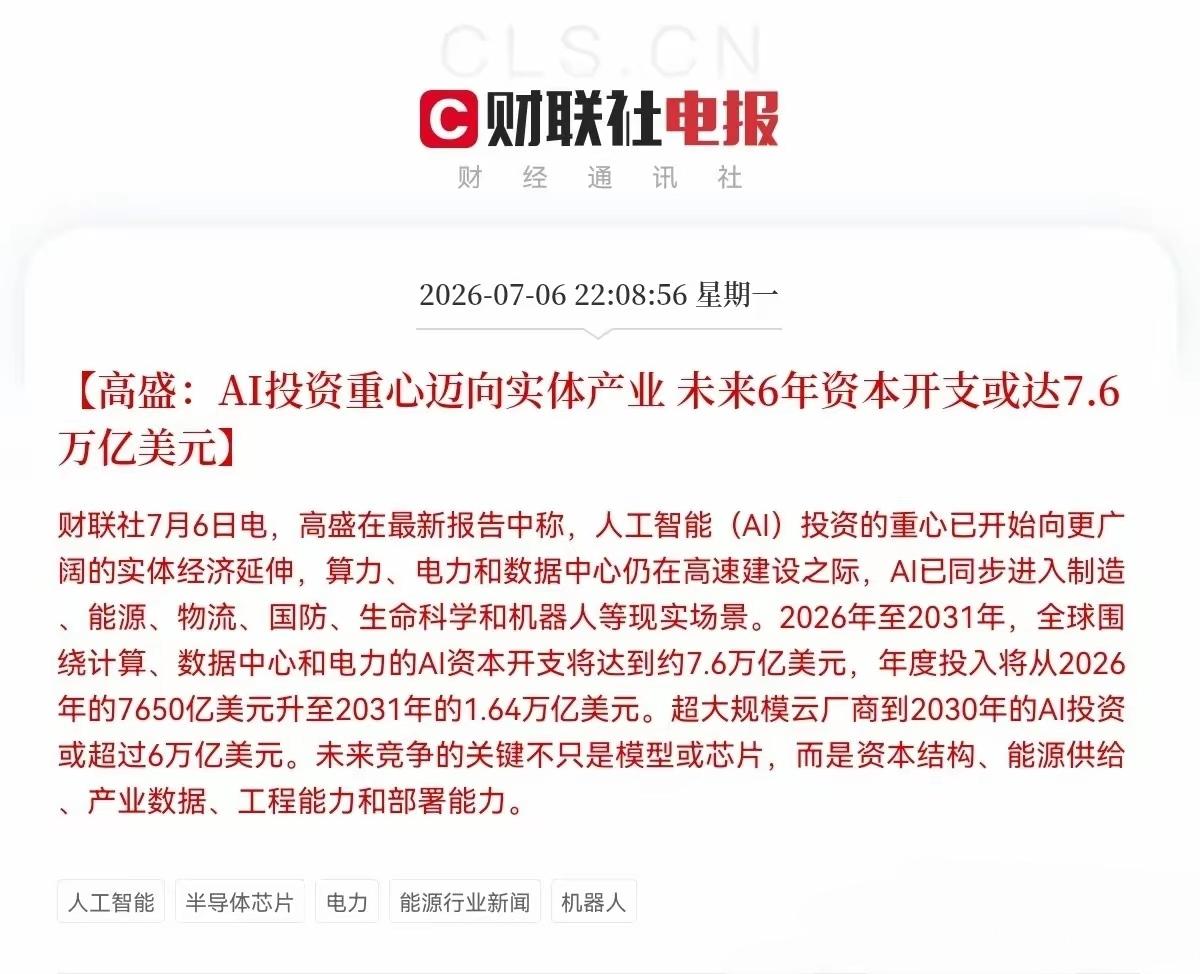
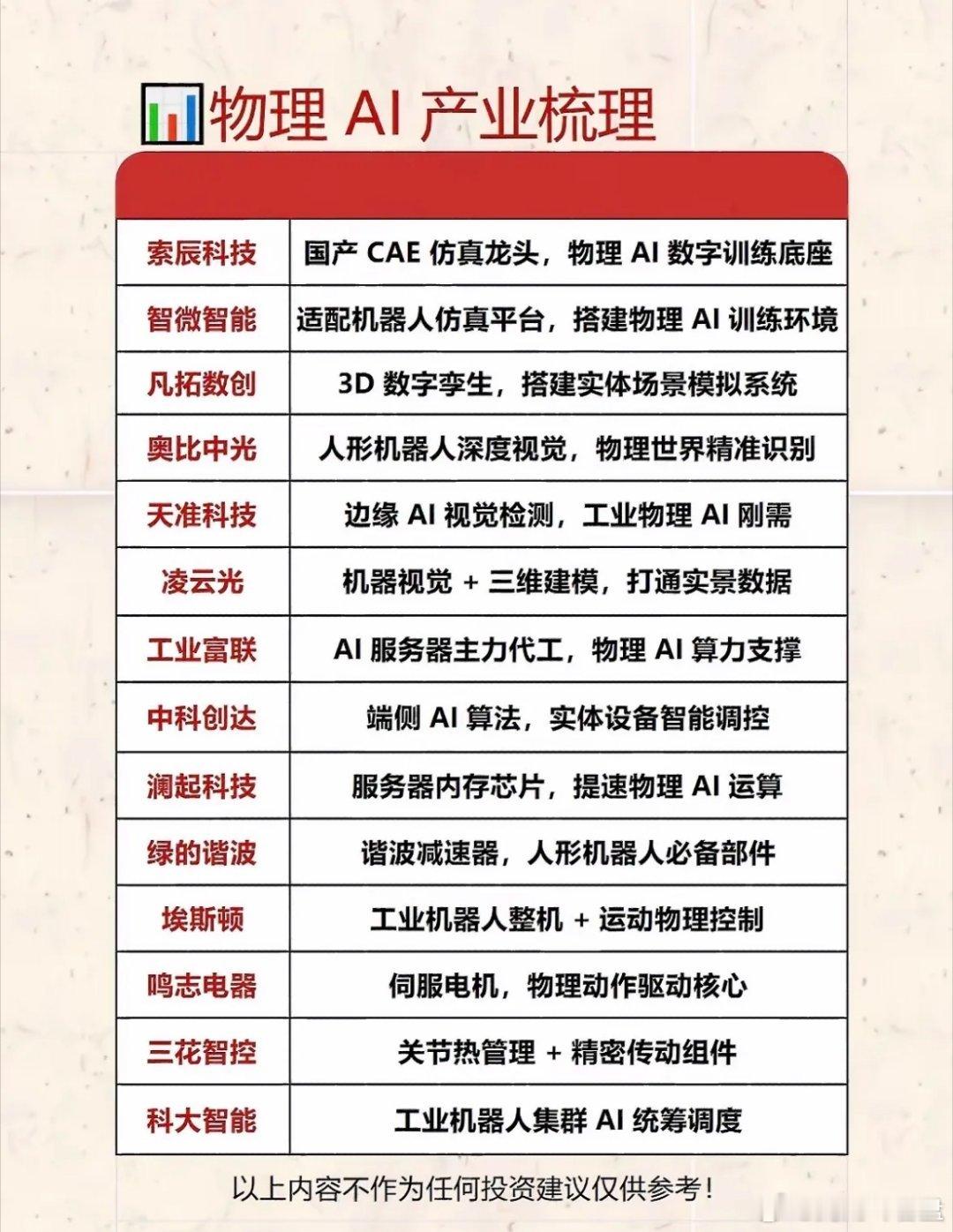
AI投资重心将迈向实体产业,未来六年的资本开支可能高达7万亿美元,主要产业高速发
AI投资重心将迈向实体产业,未来六年的资本开支可能高达7万亿美元,主要产业高速发展是算力数据中心服务器电力建设,未来的AI实体产业链就是物理AI,不管是国防,还是物流以及生物科学能源交通,人形机器人,自动驾驶技术,这些都是未来的AI物理产业链的发展!因为这些方向主要承载的就是AI人工智能从大模型里面走向实体世界的重要载体!自动驾驶技术与人形机器人可能是首先实现AI人工智能应用场景的落地!现在的自动驾驶技术与人形机器人是最为成熟的物理AI应用!首先就是自动驾驶技术应该是最先使用到AI人工智能的技术!这次变得更加的聪明与智能体人形机器人,同样只要AI人工智能技术越发先进,人形机器人就变得越发聪明,有自己的判断,推理与分析!像自动驾驶技术一样,拥有自己的判断与推理,技术与分析!经过AI人工智能大模型波段的训练推理过后,自动驾驶技术将变得更加智能化






傍晚,一份业绩预告弹出来,让市场从AI算力和人形机器人的科技叙事中短暂抽离,目光
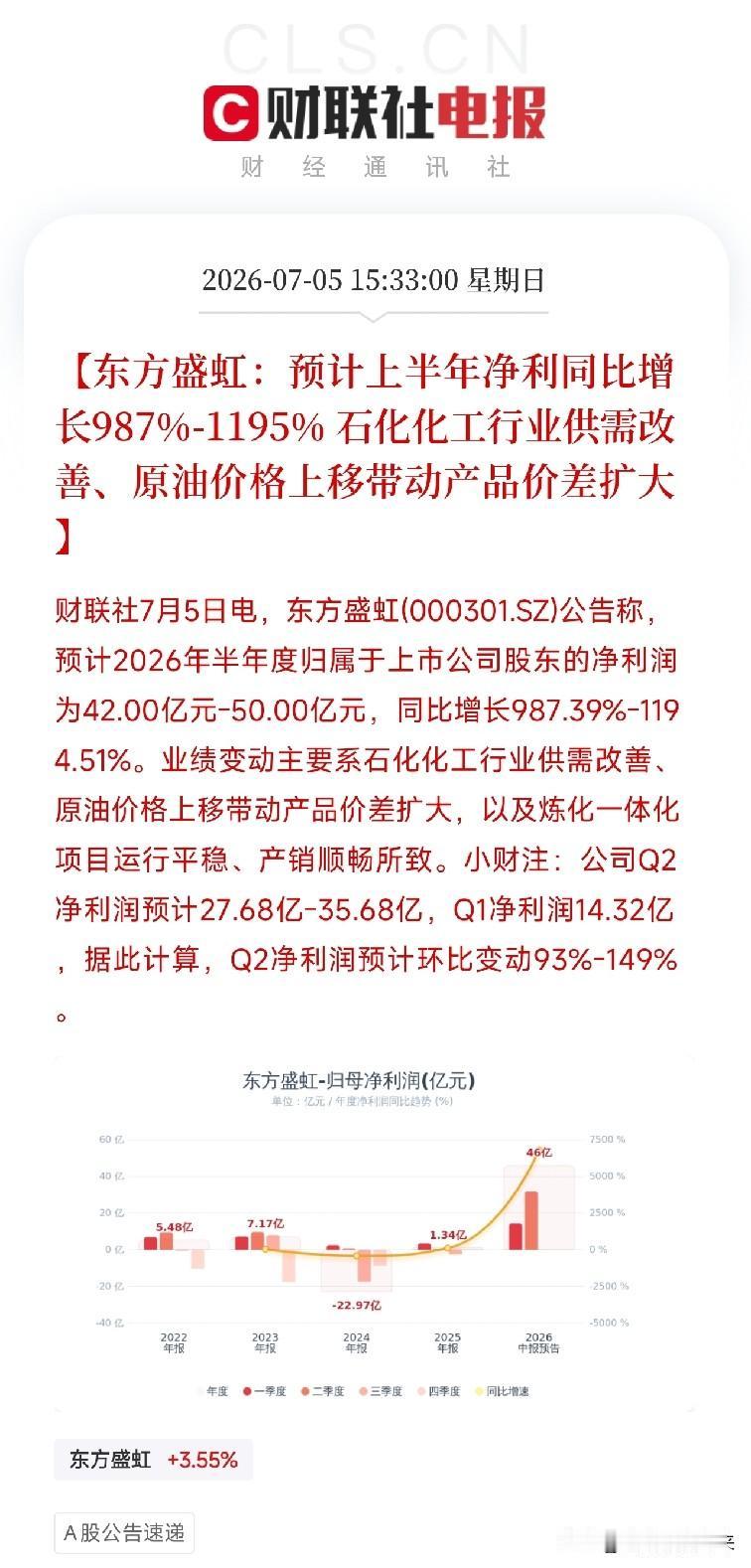
傍晚,一份业绩预告弹出来,让市场从AI算力和人形机器人的科技叙事中短暂抽离,目光转向了一座真正的印钞机,炼化工厂不是芯片,不是机器人,而是东方盛虹,这家石化巨头,上半年净利润预计42亿到50亿,同比增长987%到1195%。将近十倍,甚至接近十二倍。公告写得清楚:石化化工行业供需改善,原油价格上移带动产品价差扩大,炼化一体化项目运转平稳,产销顺畅。当全球资本市场还在为费城半导体那两根大阴线争论AI泡沫时,东方盛虹用一份十倍增速的预告,冷冷地提醒所有人:除了算力底座,这个世界还有另一套定价体系,正在同时疯狂运转。更值得琢磨的是,这份业绩预告与另一条消息形成了隐秘的呼应。就在几乎同一时间,招商轮船也发了预告,上半年净利润同比暴增超两倍,国际油轮运输市场进入超级景气周期,部分航线运价创历史新高。一个在海上运油,一个在岸上炼油,两条公告像一对齿轮,精准咬合,拼出了同一个宏观图景,全球能源化工产业链,正在经历一轮深层次的景气共振。原油价格上移,炼化产品价差扩大,运价创历史新高,这三件事同时发生,绝不只是巧合。这就是我们在前面反复说的那层逻辑。这轮全球资产重估,不是只有AI一个主角。同一时间,油轮在海上数钱,炼化厂在岸上印钞,光纤光缆公司业绩大增近十倍,江波龙利润翻了六百倍。市场的真相不是回调,而是极致分化。资金正在从拥挤不堪的算力上游往外撤,沿着产业链往更深处、往更被忽视的环节渗透。掏心窝子的话放这儿。东方盛虹的业绩预告不会让明天的化工股集体涨停,但它比你看到的任何科技产业利好都更值得记住。它告诉你,当所有人都在盯着AI的时候,那些藏在能源、化工、航运、材料里的传统巨头,正在用十倍百倍的增速,悄无声息地重估自己的价值。别光盯着美光那根阴线瞎恐慌,去翻一翻还有哪些跟能源化工、航运物流相关的暗线,正在被这场全球供需格局重塑悄悄推上浪尖。那才是这轮大周期里,另一个闷声发大财的印钞机。