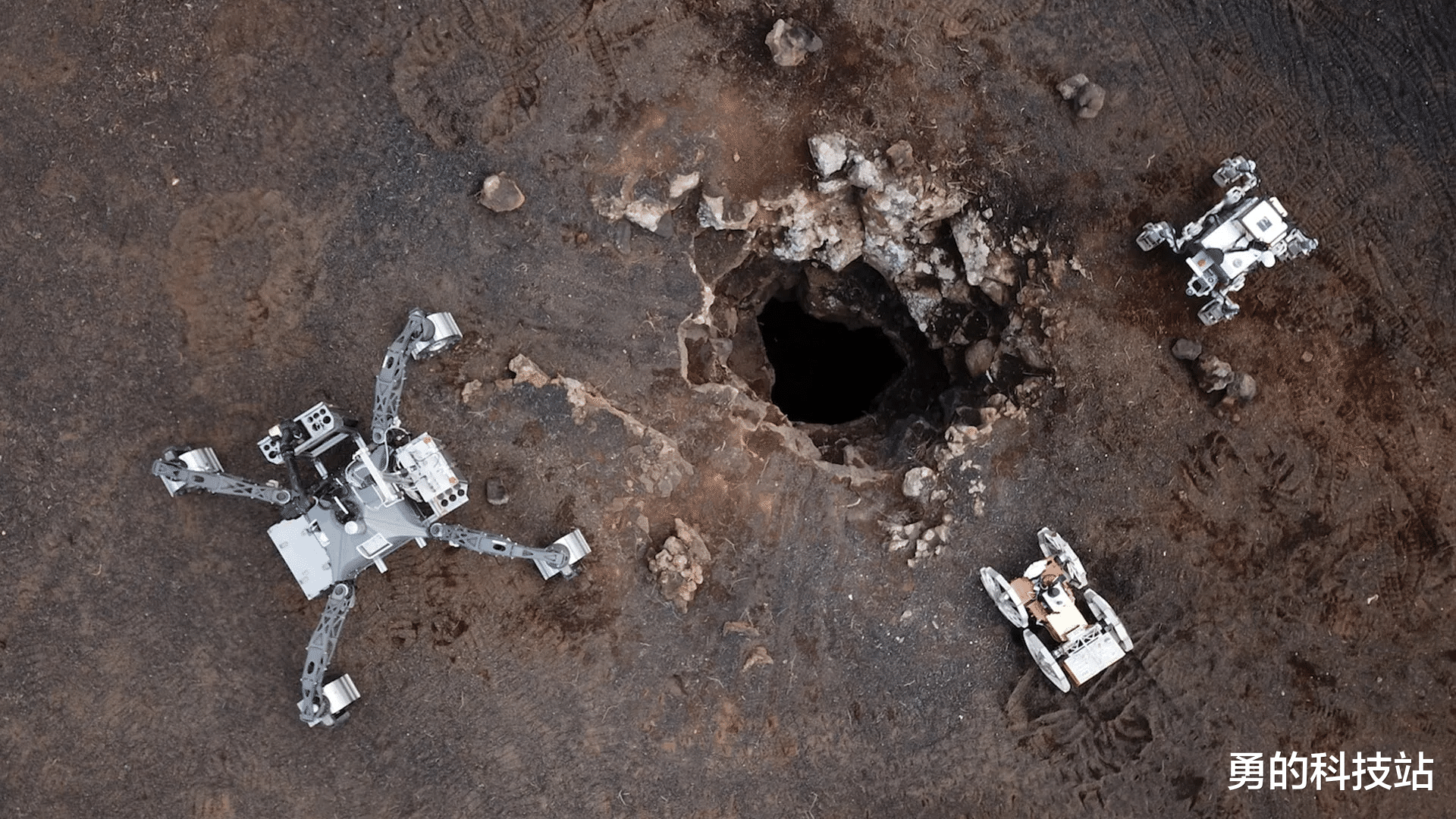
马拉加大学空间机器人实验室的科学团队在西班牙火山岛兰萨罗特测试并验证了三台机器人。图片来源:DFKI
马拉加大学空间机器人实验室携手欧盟科研联盟,提出“火山隧道自主探测”新任务概念
一、背景位于火星、月球及其他行星表面的熔岩隧道被认为是未来太空基地的理想选址。地下结构天然能屏蔽宇航员免受有害辐射与陨石撞击的威胁,然而崎岖的地形、有限的入口与恶劣的环境使得人类探测任务极其艰难。为突破这一瓶颈,欧洲科研联盟(含马拉加大学空间机器人实验室)提出了一套以三种机器人协同自主探测熔岩隧道的任务概念,该概念已发表于《Science Robotics》期刊。
二、任务概念概述三代机器人协作
探测机器人:负责对隧道入口周边进行三维扫描与导航。
感知载荷立方体:携带多种传感器(红外、光学、化学)被投掷进隧道,快速采集初步环境数据。
探路车(Scout Rover):从入口处垂直下降,进入隧道内部,随后与其他机器人共享位置与地图信息。
四个探测阶段
阶段
主要行动
关键目标
阶段 1
机器人协同完成入口周边区域的全景地图绘制
为后续任务提供精准导航基线
阶段 2
投掷感知载荷立方体,获取隧道入口至内部的初步测量
评估环境安全性与物理特征
阶段 3
探路车垂直降入隧道,抵达内部区域
触达隧道核心并对内部分布进行初步采样
阶段 4
三机器人团队深入隧道,生成高精度三维地图与完整地形模型
为未来载人或深空探测提供详细基线
实际验证
德国人工智能研究中心(DFKI)主导的联盟在西班牙兰萨罗特岛(Lanzarote)的活火山洞穴开展了实地试验。试验展示了三代机器人在真实环境中的协同操作与自适应导航能力,验证了任务概念的可行性,并凸显了协同机器人系统的技术潜力。
三、未来应用试验结果表明,该任务概念技术可行且具备极高的推广价值。若能将同一协作框架迁移至月球或火星,三台自主机器人将成为深空探测任务中的关键力量。该研究为后续行星探测技术的持续发展提供了有力支持,特别是在“火山隧道”这类极端地下环境的探索方面。
四、马拉加大学空间机器人实验室的角色马拉加大学(UMA)空间机器人实验室致力于研发提升太空机器人自治水平的新方法与技术,覆盖行星探测与轨道任务两大领域。近年来,实验室与欧洲航天局(ESA)密切合作,开发了能帮助探测车(Rover)实现更自主路径规划与自主操作的算法。同时,实验室承担空间机器人工程师的培养工作,UMA工业工程学院学生通过实习、论文项目等方式参与相关科研,许多项目与国内外研究机构及企业通过联合研究或技术转让协议合作开展。
五、官方声明“我们相信,三代协作机器人的任务概念能够解决火山隧道探测的主要技术难题,并为未来月球及火星深空探测提供可复制的技术路径。”
——DFKI 负责人
“本实验室与欧盟科研联盟的合作,为培养下一代太空机器人专家提供了宝贵平台,也为我国未来行星探测技术奠定了坚实基础。”
——UMA空间机器人实验室主任
勇编撰自论文"Cooperative robotic exploration of a planetary skylight surface and lava cave".Science Robotics.2026相关信息,文中配图若未特别标注出处,均来源于自绘或公开图库。