技术巡猎 小鹏汽车 一种电机的电流采样方法、装置、设备及介质。一个底层的问题:电机控制的过程里,电流到底该在什么时候采集信号?永磁同步电机做FOC控制的时候,电流反馈就像人的眼睛。你想让电机输出多少扭矩,控制器要先知道当前电流状态,再去调PWM、调磁场、调扭矩。问题在于,车上的电机不是慢慢工作的。PMSM控制开关频率可以到20000Hz,也就是一秒钟开关两万次。换句话说,每一个PWM周期都非常短,里面还塞着MOS管开关、ADC采样、控制算法更新这些动作。大家都在抢时间,谁慢一点、偏一点,结果就不一样。
三相全桥逆变器里,上桥臂、下桥臂的MOS管不断开关。MOS管从开到关、从关到开,并不是理想世界里“啪”一下完成,中间会有一个过渡过程。这个过程容易产生电压尖峰、电磁干扰,也就是信号里的毛刺。你在这个时间点采电流,采到的就不完全是真实电流,而是“真实电流+开关噪声”。
后面控制器即使再认真计算,也只是拿着脏数据做精密控制。听起来很荒诞,但工程里这种事太常见了。
传统处理方式一般有两个方向。一个是多采几次,靠过采样把噪声压下去;另一个是加滤波,把高频干扰滤掉。办法当然有用,但都有代价。过采样会增加计算压力,高速工况下实时性容易吃紧;滤波会引入延迟,电流反馈慢半拍,扭矩控制也会跟着慢半拍。对于转向助力、电驱扭矩控制这种场景,慢半拍不是小事。
小鹏这项专利的思路是这样的,与其后面费劲清洗脏数据,不如一开始就找一个更干净的时间窗口采样。
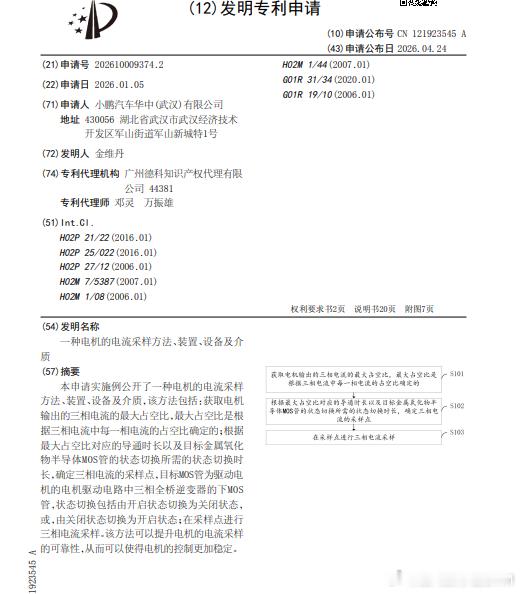
它的核心动作有三个。第一,获取三相电流对应PWM里的最大占空比。A、B、C三相各有自己的PWM导通时间,谁的占空比最大,谁占用的导通窗口最长。系统把这个最大占空比拿出来,相当于找到了当前PWM周期里最紧张、最容易影响采样窗口的那一相。
第二,把这个最大占空比对应的导通时长,和下桥臂MOS管的切换时长放在一起算。因为真正要避开的,不只是导通时间本身,还有MOS管切换时那一小段不稳定时间。目标MOS管是三相全桥逆变器的下MOS管,状态切换包括从开启到关闭,也包括从关闭到开启。
第三,根据这个结果确定采样点。采样点可以放在PWM周期尾部,也可以放在PWM周期首部,还可以首尾各采一次。尾部采样,就是等下桥臂MOS管完成关闭之后,再安排ADC完成电流采样;首部采样,就是在下桥臂MOS管重新开启之前,确认还有足够的采样时间。核心原则很朴素:别在MOS管刚切换、信号最脏的时候下手。
这个逻辑用生活场景讲,就是你要量一个人在安静状态下的心率,那就别在他刚爬完楼、还喘着的时候量。不是不能量,是量出来很难代表真实状态。
专利里还有一个很重要但容易被忽略的点:采样通道、输出通道、电机控制通道的计时器要同步。
这个非常关键。高频PWM控制里,采样点不是一句“靠近尾部”就完了,它要落到具体的微秒级位置。PWM输出用一个时间基准,ADC采样用另一个时间基准,控制任务再用第三个时间基准,各跑各的,最后很容易出现采样点漂移。专利里通过定时器通道、寄存器配置,让采样和PWM输出挂到同一个节拍上。这样电机调速脉冲怎么变,电流回采位置也能跟着变。
这才是这项专利真正有意思的地方。它不把PWM占空比、MOS管开关延迟、ADC采样转换时间、控制任务时序全部放到到一起观察了。
这不是一个酷炫的专利,不过能把这些脏活处理干净,电机控制才谈得上稳定。