技术巡猎 比亚迪 一种车辆状态识别方法、控制器、存储介质和车辆。“打滑识别”,这个词给你的第一反应,是不是“看轮子转没转空”?其实没这么简单。雨雪路、地库坡道、湿滑井盖、弯中补电门这些场景里,车轮开始不老实的时候,往往不是一下子就卖力空转的,“力没使到地上”的状态是一点点出现的,人有时候感觉得到,系统未必来得及认出来。
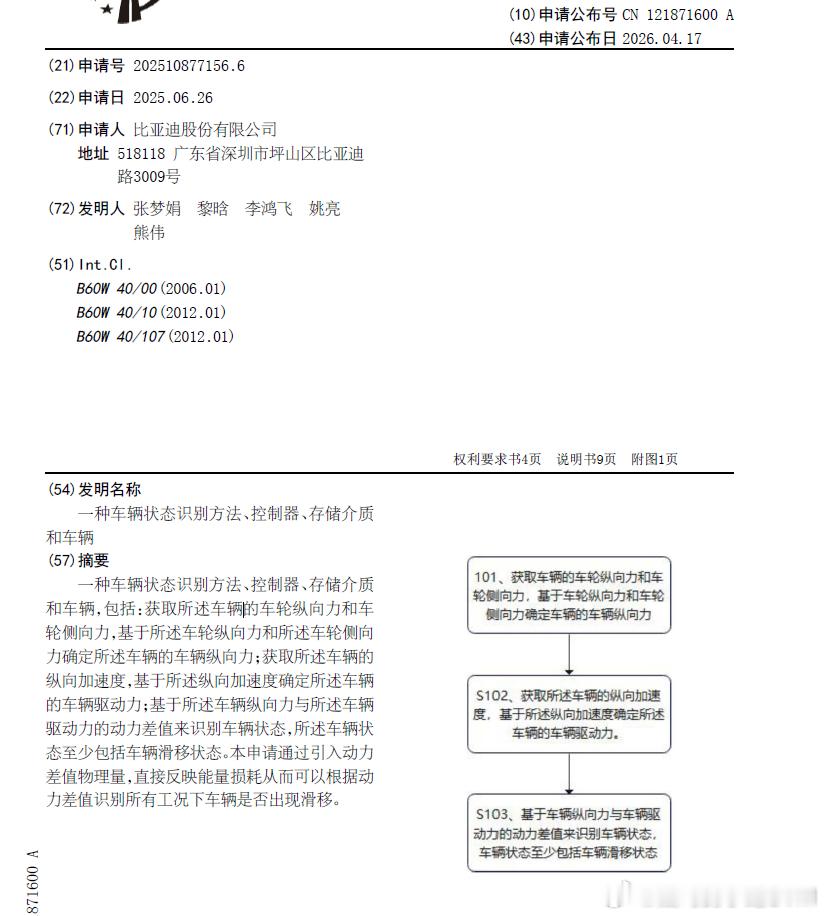
“轮速差大不大”不是这个专利的思路。专利先拿每个车轮的纵向力、侧向力,再合成整车纵向力;另一边再通过车辆纵向加速度,算出这台车真正把车身往前或往后推起来的驱动力。然后把这两个量放在一起比,得到一个“动力差值”。这个差值,就是轮胎在地面上干了多少活,和车身真正吃到了多少活,中间到底差了多少。
滑移本质上就是能量没用在该用的地方。你给了电门,电机很卖力,轮胎也在输出,但车身没有按这个力老老实实往前走,中间丢掉的那一截,很多时候就耗在打滑上了。它引入动力差值这个物理量,就是用来直接反映能量损耗,且认为滑移导致部分能量没有转化成期望的有用功,所以可以拿它来识别车辆是不是在滑。
这种方法有个天然好处,就是它不一定非要等轮胎已经疯狂冒烟、疯狂空转才知道出问题。只要“轮胎输出”和“车身响应”对不上,系统理论上就能更早察觉问题。它也不是只盯着直线加速。它把轮胎的纵向滑移、侧向滑移都纳进去了,还把前后轮侧偏角、横摆角速度这些和转向相关的量也考虑进来---它想识别的不只是“原地空转”这么简单,而是车辆在更复杂工况下,轮胎有没有偏离正常抓地状态。
比如你在湿滑弯道里补一脚电门,或者地下车库转着方向上坡的时候,问题往往不是纯纵向的,侧向和纵向是缠在一起的。这个时候,只看轮速,容易慢半拍;受力和车身响应一起看,逻辑上会更完整。
它也不是一个信号一跳就判定“滑了”。加了不少约束条件,比如车辆在D挡还是R挡、修正后的纵向加速度、轮速均值、车速、油门深度、制动踏板深度等等,都是一起参与判断的。因为真实道路不是实验室。踩油门、踩刹车、倒车、爬坡,这些工况下信号的含义本来就不一样。
还专门区分了“进入打滑”和“退出打滑”两套阈值。因为控制系统最怕来回抽风:刚说你滑了,下一秒又说没滑,再下一秒又滑了,车就会一顿一顿,驾驶感受会很差。进入和退出分开设门槛,可以给系统留出稳定区间,避免反复横跳。
它也不是停在“识别”这里。识别出滑移状态之后,可以基于这个动力差值去控制车辆扭矩输出,让车辆退出滑移状态。也就是说,这个判断结果会被直接送进整车扭矩控制链路里。日常驾驶里,这种能力的价值其实很容易感受到。比如雨天红绿灯起步,地库出口上坡,北方冬天压雪起步,或者高速变道时一侧轮胎轧到积水。很多时候你不会看到特别戏剧化的失控画面,但车已经开始有轻微的抓地变化了。