英文题目:Aerial-aquatic robots capable of crossing the air-water boundary and hitchhiking on surfaces
中文题目: 能够跨越空水界面并在表面“搭便车”的跨介质机器人
作者: Lei Li, Siqi Wang, Yiyuan Zhang, Shanyuan Song, Chuqian Wang, Shaochang Tan, Wei Zhao, Gang Wang, Wenguang Sun, Fuqiang Yang, Jiaqi Liu, Bohan Chen, Haoyuan Xu, Pham Nguyen, Mirko Kovac, Li Wen(通讯)
作者单位: 北京航空航天大学、帝国理工学院、南方科技大学等
期刊: Science Robotics(IF 25.7 中科院一区,JCR一区)
发表时间: 2022年5月18日
链接:https://www.science.org/doi/10.1126/scirobotics.amb6695
引文格式: Li L, Wang S, Zhang Y, et al. Aerial-aquatic robots capable of crossing the air-water boundary and hitchhiking on surfaces[J]. Science Robotics, 2022, 7: eabm6695.
01 全文速览想象一下,一个机器人既能像无人机一样在空中飞行,又能像潜水器一样潜入水下,还能像䲟鱼那样“贴”在任何移动的物体上搭个便车——这就是北航文力团队与帝国理工Mirko Kovac团队联合开发的空水跨介质吸附机器人。
研究团队从䲟鱼的吸盘结构中获得灵感,揭示了其冗余密封、自适应贴合、静压增强的三大吸附原理,并以此为基础开发了一款仿生吸盘。将这个吸盘集成到一台带有可折叠螺旋桨的无人机上,机器人实现了0.35秒内从水下冲出水面、在空中和水下都能牢固吸附在各种复杂表面(粗糙、弯曲、破损、生满藻类)上的能力。野外测试中,它成功在山间溪流和海洋环境中完成跨介质拍摄和物体搬运。
核心亮点:
✅ 极速跨介质:0.35秒从水下冲出水面,可连续7次穿梭
✅ 强悍吸附力:水下最大吸附应力达69.6 kPa,可挂载超过自身重量23倍的物体
✅ 极端表面适应性:可吸附粗糙(Ra 764 μm)、弯曲(曲率2.18)、破损、生物污损表面
✅ 超长待机:吸附状态下功耗仅为悬停状态的1/51.7(空中)和1/19.2(水下)
✅ 野外实战:完成山溪起跳、海洋拍摄、海床取样等真实场景任务
02 研究内容🐟 灵感来源:䲟鱼为什么能“吸”在海豚身上?
䲟鱼(俗称吸盘鱼)头顶有一个由背鳍演化而来的椭圆形吸盘,靠着这个吸盘,它能牢牢吸附在鲨鱼、海豚甚至船底“搭便车”。研究团队好奇的是:当海豚跃出水面时,䲟鱼为什么还能吸得住?

图1. 鲳鱼黏附结构的形态特征。 (A) 鱼鱼可以保持附着在空中:当海豚在空中跳跃以试图驱除寄生虫时,鱼鱼会牢牢地附着在海豚的侧面。 (B) 鳉鱼可以附着在水族箱侧面的多孔表面上(比例尺,1 厘米;视频 S1)。 (C) 附着在空气中透明玻璃上的麻醉鲳鱼的 FTIR 图像(背视图)。绿色荧光区域表示圆盘与玻璃基板接触的位置;深黑色区域表示光盘的层状隔室,不与表面接触(比例尺,1 厘米;视频 S2)。 (D) 鲳鱼头部和位于其背侧的椎间盘垫的显微 CT 扫描横截面图(比例尺,2 毫米)。 (E) 薄层结缔组织,无缝连接薄片和外围椎间盘唇缘,用光学显微镜显示(比例尺,4 毫米;视频 S3)。 (F) 从侧面看单个板层骨结构的 3D 重建模型。显示了薄片腹突和附着表面之间的斜角 (α) 以及薄片顶面和附着表面之间的角度 (β)。角度是鱼鱼所有片层的平均值(比例尺,2 毫米)。
通过高速摄像、micro-CT扫描和FTIR接触测量,团队发现:
1. 冗余密封:吸盘内部由多排鳍片分隔成25个独立腔室,即使部分腔室泄漏,其余腔室仍能保持吸附柔软的结缔组织,可被动旋转,适应表面微观形貌
3. 静压增强:吸盘下方的血管和肌肉组织可通过液压驱动鳍片竖起,增强摩擦力
这三大机制让䲟鱼吸盘在空气和水中都能可靠工作。
🔧 仿生实现:把䲟鱼吸盘“装”进机器人
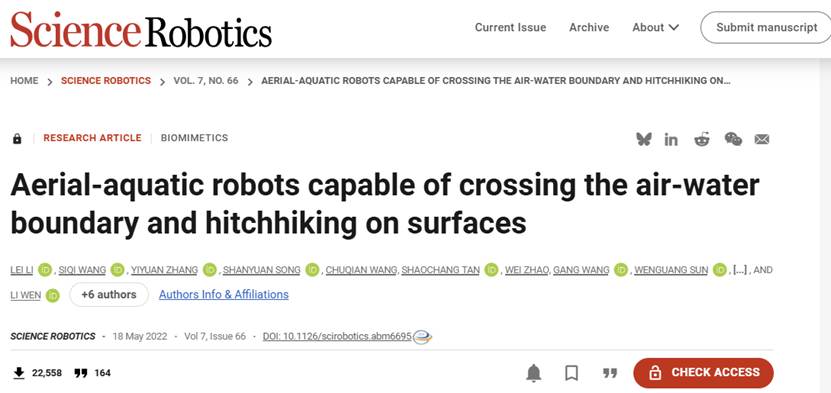
基于上述原理,团队设计制造了一款分层结构的仿生吸盘:
- 软连接层:模拟结缔组织,实现冗余密封
- 多材料3D打印主吸盘:包含刚性鳍片和柔性唇边
- 微通道液压驱动层:可独立竖起每排鳍片
- 纤维增强弯曲驱动层:可使吸盘整体弯曲,适应曲面
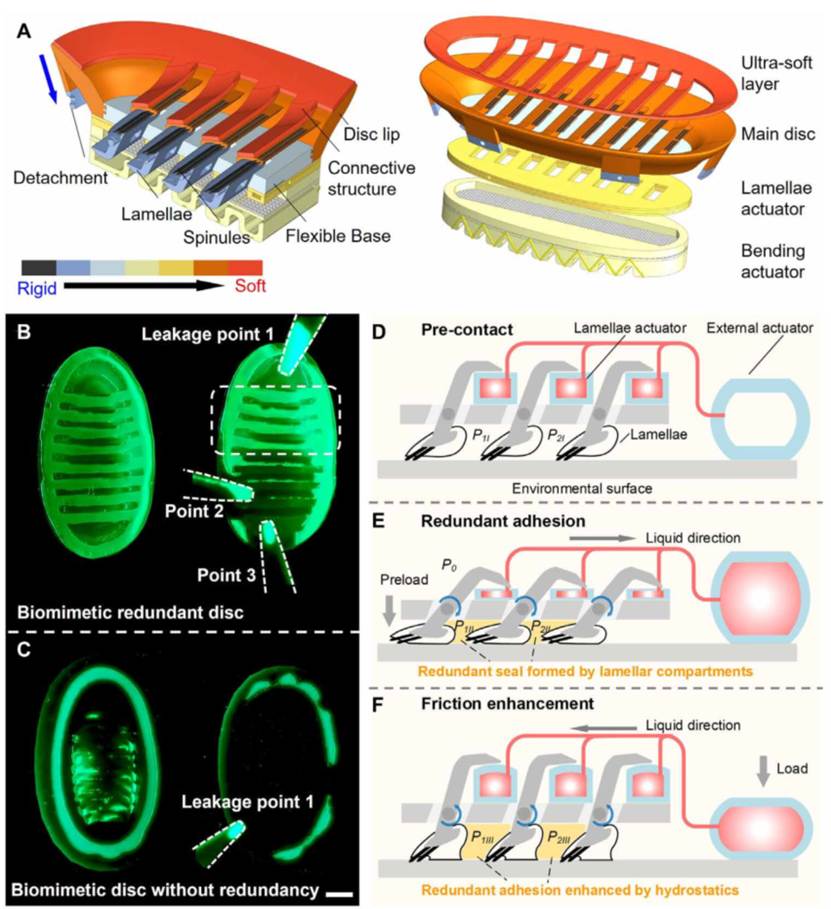
图2 冗余仿生粘合盘的实现及工作原理。 (A) 仿生鱼盘原型的 CAD 模型(盘长,87 毫米;宽,46 毫米)。仿生原型的横截面图像显示了薄片、连接结构、盘唇、柔性底座和软执行器。该圆盘由四个功能层组成:连接薄片和圆盘唇缘的薄超软层、多材料 3D 打印的主圆盘、用于旋转薄片的薄流体驱动微通道网络层,以及用于弯曲圆盘的由纤维增强的软流体致动器。不同的颜色表示具有不同机械刚度的材料。 (B 和 C) 冗余和非冗余仿生粘合盘的接触表面(FTIR 图像)。绿色表示圆盘在光滑透明基材上的接触面积。比例尺,10 毫米。 (B) 左:多余的椎间盘在附着过程中形成九个层状隔间。右图:从三个位置破坏密封后,多余的圆盘仍然使用其其余的分隔室保持连接。 (C) 左图:非冗余盘在整个盘唇缘形成一个单室。右图:非冗余盘在产生一个泄漏点后立即分离。 (D) 至 (F) 总结了光盘粘附过程的三个阶段。 (D) 预接触(第 1 阶段)。(E) 自适应、冗余粘附(第 2 阶段)。 (F) 通过静水力增强摩擦(第 3 阶段)。两个隔室的内部压力分别表示为P1和P2。 P0代表环境的流体压力。
图中展示了:A. CAD模型及分层结构;B-C. 有/无冗余设计的吸盘接触面对比;D-F. 吸附三阶段原理示意。
实验结果令人振奋(图3):
- 冗余设计使摩擦力提升44%(空气)和15%(水下),吸附时间延长458%(空气)和206%(水下)
- 自适应鳍片使摩擦力提升61%(空气)和30%(水下)
- 静压增强使摩擦力再提升56%(空气)和41%(水下)
- 吸盘可吸附粗糙度达764 μm的表面(水下),曲率适应能力达2.18
- 最大吸附应力:空气39.6 kPa,水下69.6 kPa(相当于挂着2.2公斤的物体不掉)
- 吸附时间:水下负载10 N时可达2944分钟(约49小时)
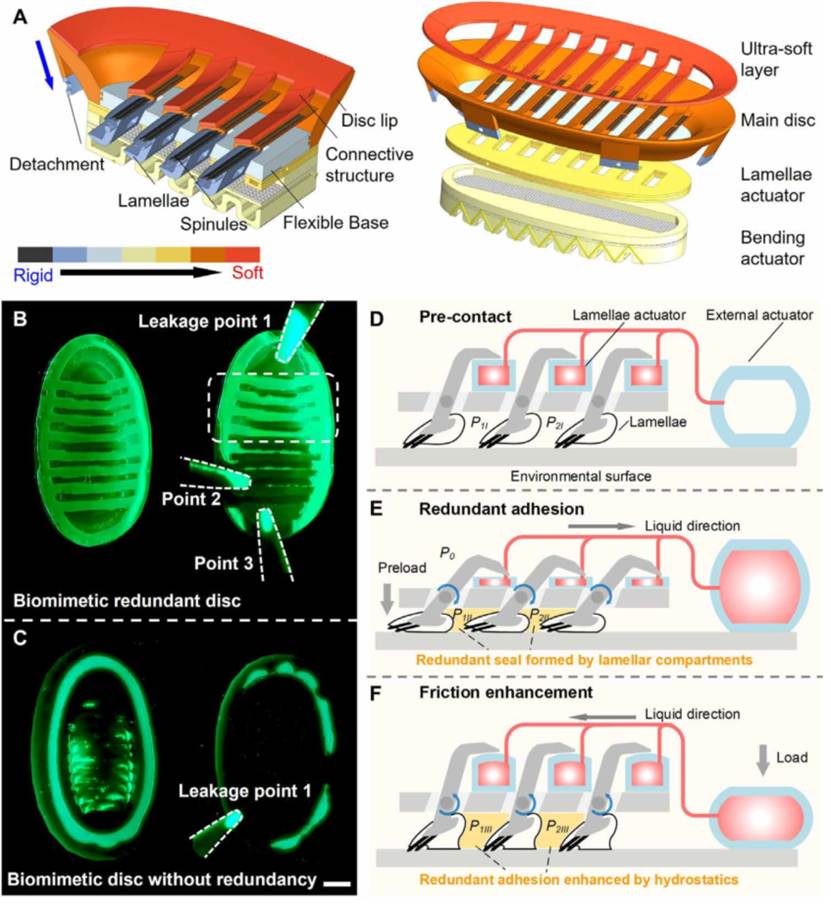
图3 冗余仿生粘合盘的实现及工作原理。 (A) 仿生鱼盘原型的 CAD 模型(盘长,87 毫米;宽,46 毫米)。仿生原型的横截面图像显示了薄片、连接结构、盘唇、柔性底座和软执行器。该圆盘由四个功能层组成:连接薄片和圆盘唇缘的薄超软层、多材料 3D 打印的主圆盘、用于旋转薄片的薄流体驱动微通道网络层,以及用于弯曲圆盘的由纤维增强的软流体致动器。不同的颜色表示具有不同机械刚度的材料。 (B 和 C) 冗余和非冗余仿生粘合盘的接触表面(FTIR 图像)。绿色表示圆盘在光滑透明基材上的接触面积。比例尺,10 毫米。 (B) 左:多余的椎间盘在附着过程中形成九个层状隔间。右图:从三个位置破坏密封后,多余的圆盘仍然使用其其余的分隔室保持连接。 (C) 左图:非冗余盘在整个盘唇缘形成一个单室。右图:非冗余盘在产生一个泄漏点后立即分离。 (D) 至 (F) 总结了光盘粘附过程的三个阶段。 (D) 预接触(第 1 阶段)。(E) 自适应、冗余粘附(第 2 阶段)。 (F) 通过静水力增强摩擦(第 3 阶段)。两个隔室的内部压力分别表示为P1和P2。 P0代表环境的流体压力。
🚁 机器人集成:会“变形”的螺旋桨
将仿生吸盘集成到一台定制的四旋翼无人机上(图4A),总重950克。最大的技术挑战是:如何让螺旋桨在水下和空中都能高效工作?
解决方案:被动折叠螺旋桨
- 水下旋转时,流体阻力使桨叶收拢,直径85 mm
- 冲出水面瞬间,转速激增,离心力使桨叶展开,直径170 mm
- 折叠比2:1
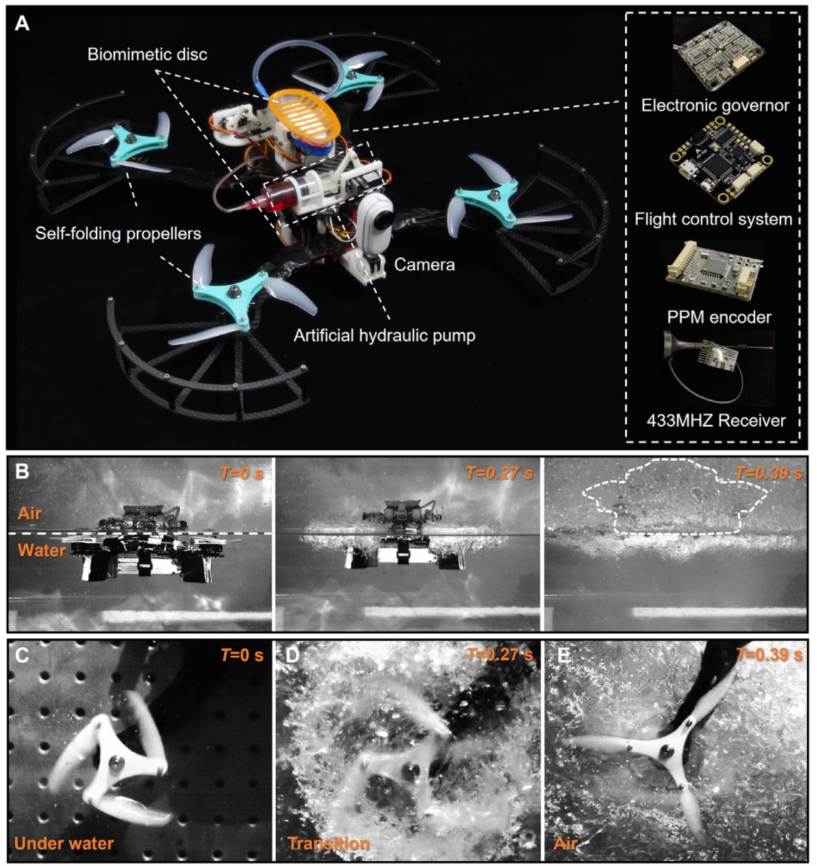

图4 自折叠螺旋桨空中-水中搭便机器人及其空气/水转换性能。这个机器人是独立的;它可以远程控制飞行、游泳、附着在空气和水中的表面,并且可以跨越两种介质。 (A) 无线机器人及其主要部件的俯视图。 (B) 机器人在实验室水箱中不同时刻从水中起飞的图像。 (C 到 E) 从水到空气过渡期间的自折叠螺旋桨性能。 (C) 螺旋桨在旋转时在水下保持折叠状态。 (D) 螺旋桨在水-空气界面处自行延伸的高速图像。 (E) 螺旋桨在空中完全展开。 (F和G)自折叠螺旋桨在水下(F)和空气中(G)不同转速下的推力(N = 5)。临界转速(和相应的力)在(F)和(G)中用水平虚线标记。通过超过临界转速(由相同的电机油门百分比驱动),机器人可以在水下向上移动[(F)中的蓝色虚线]或在空中飞行[(G)中的红色虚线]。 (H) 在从水到空气的过渡过程中,螺旋桨的转速(所有四个转子的平均值)随时间变化。两条黑色虚线之间的区域代表了过渡过程,从机器人的螺旋桨接触水面开始,到机器人完全离开水面结束。黑点表示自折叠螺旋桨何时达到提升机器人所需的转速(8500 rpm)。 (I) 自折叠螺旋桨、商用螺旋桨和固定在展开状态的自折叠螺旋桨在不同油门百分比下的过渡时间比较(N = 5)。 (J) 在一种典型的水-空转换过程中,机器人的横滚角和俯仰角与时间的关系。 (K) 机器人连续穿越空气-水边界的三个典型循环(视频 S10)。所有误差条均代表±1 SD。
图中展示了:A. 机器人结构;B. 水-空过渡序列;C-E. 螺旋桨折叠-展开过程;F-G. 推力-转速曲线;H. 转速-时间曲线;I. 过渡时间对比;J. 姿态角变化;K. 连续过渡序列。
性能对比:

最佳成绩:100%油门时,0.35秒完成水-空过渡!过渡过程中最大姿态角仅2.4°,稳定性优异。
机器人可连续7次穿梭空水界面,在水下1.5米深处完成“8”字形和五角星轨迹航行。
🚀 “搭便车”演示:从实验室到野外
实验室测试(图5)
团队搭建了一套移动平台系统,测试机器人吸附在运动物体上的能力:
- 接触阶段峰值垂向力:空气78.6 N,水下60.6 N
- 吸附跟随阶段剪切力仅0.375 N(空气)和4.3 N(水下)
- 可吸附仅一半吸盘接触的窄表面(见movie S13)、弯曲粗糙表面、带孔破损表面(见movie S14)
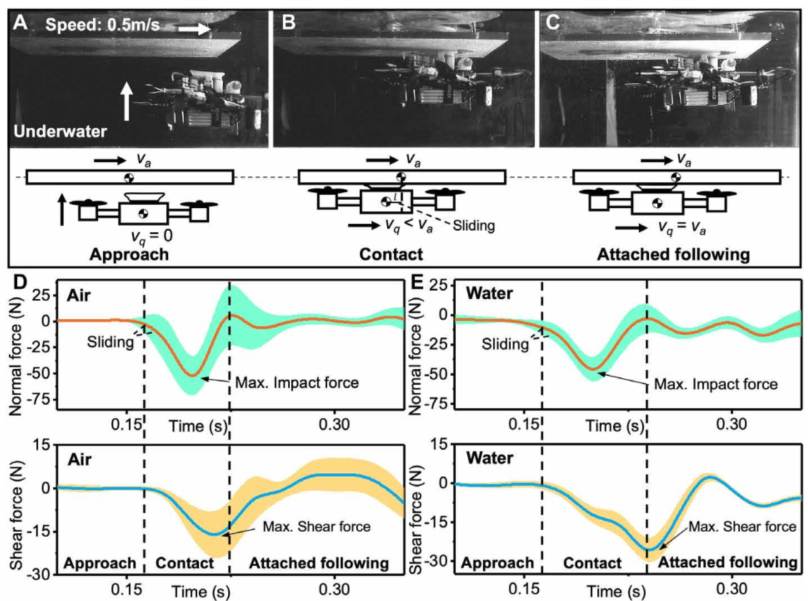
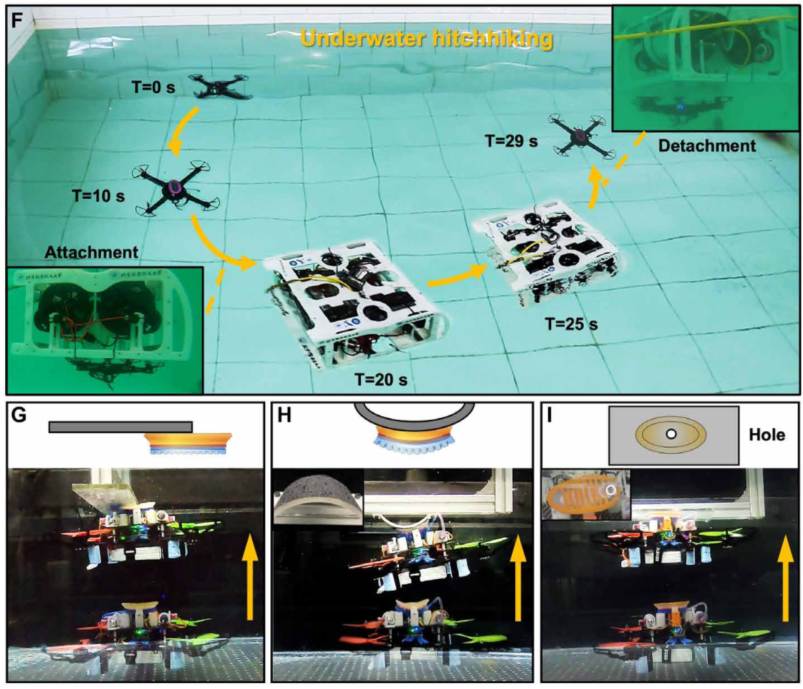
图5. 空中水上机器人的搭便车和粘附性能。 (A 到 C)机器人搭便车到水下移动板(光滑的亚克力)上的高速图像。板以受控的速度从左向右移动。机器人垂直向上移动,直到附着到板上。搭便车的过程分为三个阶段。视频 S13 中提供了搭便车到移动表面的视频。 (A) 接近阶段,(B) 接触阶段,(C) 附着跟随阶段。请注意,高速相机安装在移动托架上,并且具有与板相同的速度和方向。当机器人以 0.5 m/s (N = 3) 的速度移动时,在空中 (D) 和水下 (E) 搭便车,测量板的垂直力和剪切力。阴影误差线代表±1 SD。曲线由 B 样条曲线拟合。 (F) 机器人在实验室水池中展示搭便车行为(参见视频 S13)。插图是在水下拍摄的,显示了机器人与主机(远程操作车辆)的附着和分离。(G到I)展示机器人的冗余粘附能力。 (G) 机器人可以仅用其圆盘的一半附着在狭窄的丙烯酸表面上。 (H) 机器人还可以粘附在弯曲、粗糙的表面和中间有 10 毫米直径孔的损坏表面 (I)。
图中展示了:A-C. 吸附运动物体三阶段;D-E. 力-时间曲线;F. 水下吸附大型ROV;G-I. 吸附挑战性表面。
野外实战(图6、7)
团队带着机器人走进真实环境:
- 空中吸附(图6A):机器人飞抵建筑物,吸附在水平屋顶、曲面外墙和45°斜面上,用摄像头拍摄
- 湖泊监测(图6B):从陆地起飞→扎入湖水→水下拍摄→冲出水面→航拍湖景
- 溪流挑战(图6C-D):在山间溪流中,机器人从水底起飞,吸附在流速1.5 m/s的湿滑岩石上,画面几乎无抖动

图6 空中水上搭便机器人的现场应用。 (A) 机器人在空中建筑物的水平、曲面和斜(45°)表面上无缝切换从飞行到附着,并可以使用机载摄像头录制视频。(B) 湖泊水体监测演示(视频 S18)。 (C) 机器人飞出水面并附着在一块粗糙的岩石上。 (D) 机器人在非结构化、具有挑战性的表面上实现了稳定的手动附着(最初是用手附着),例如自然溪流中光滑、不平坦的岩石。
- 海洋任务(图7A-D):机器人吸附在ROV底部潜入10-15米深海底,拍摄到扇贝、海藻、寄居蟹;从海床直接起飞拍摄海岸线;用底部吸盘抓起一块带海藻的采样板,从水中取出

图7.空中-水中搭便车机器人在野外的性能。 (A) 机器人从流动的淡水溪中起飞(视频 S19)。右侧的两个图像面板显示来自机载摄像机的空中(顶部)和水下(底部)图像。 (B) 最初用手附着后,机器人能够牢固地附着在以约 1.5 m/s 的速度流动的自然溪流中的光滑岩石上。右侧的图像面板显示机载摄像机图像,只有很小的振动。 (C) 连接到游泳主机(遥控车辆)底部的机器人。底部海底的图像包括扇贝、海藻、士兵蟹等。 (D) 机器人从海滩的海水中飞出。 (E) 机器人在下方放置一个仿生圆盘,抓住一个装有海藻的平坦样品板,并将其从水中取出。
在这些任务中,机器人的吸附状态功耗比悬停状态降低51.7倍(空中)和19.2倍(水下),展现了长时间工作的潜力。
03 创新点① 揭示䲟鱼吸盘的“冗余-自适应-静压增强”三大机制
首次系统阐明䲟鱼吸盘在空水两相中都能可靠吸附的生物学原理,并通过仿生验证了各机制的作用。
② 首创分层冗余仿生吸盘
将三个功能层集成在一个吸盘内,实现了冗余密封+自适应贴合+液压增强的协同工作,性能远超传统吸盘和此前仿生吸盘。
③ 被动折叠螺旋桨设计
无需额外驱动机构,仅靠流体力和离心力实现桨叶的自动折叠/展开,大幅缩短空水过渡时间,为跨介质飞行器提供新思路。
④ 空水两栖吸附能力验证
系统测试了机器人对粗糙、弯曲、破损、生物污损等多种挑战性表面的吸附能力,并首次在野外真实环境中验证。
⑤ 功耗对比量化“搭便车”价值
首次量化了吸附状态相较于悬停状态的功耗降低倍数,为长航时任务设计提供了数据支撑。
04 总结与展望本研究开发了一款集成䲟鱼仿生吸盘和折叠螺旋桨的空水跨介质机器人,实现了快速跨介质(0.35秒) 和在各种复杂表面上的可靠吸附两大核心能力。通过揭示并复现䲟鱼吸盘的三大机制(冗余、自适应、静压增强),机器人不仅吸附力强、适应面广,还能在吸附状态下大幅降低功耗(仅为悬停的1/51.7)。野外测试进一步验证了其在真实环境中的应用潜力。
未来研究将聚焦于以下几个方向:
🔸 吸附状态感知:集成柔性传感器,实时监测吸附力、密封状态,实现闭环控制。
🔸 深度与通信能力提升:目前水下工作深度仅2.2米(受限于无线通信模块),未来需突破深度限制,拓展应用场景。
🔸 自主导航与避障:结合视觉、声呐等传感器,实现无人工干预的自主跨介质航行与目标吸附。
🔸 智能识别与跟踪:利用机器学习,让机器人能自动识别并跟踪特定生物或目标,用于生态监测。
🔸 多机协同:多个机器人协同作业,完成大范围搜索、采样、监测等任务。
🔸 能量密度与续航优化:探索新型电池或能源方案(如海水电池),进一步延长任务时间。
从䲟鱼的“搭便车”到机器人的“跨介质吸附”,仿生学又一次向我们展示了自然演化的精妙。未来,这类机器人有望在海洋科考、环境监测、灾害救援、水下考古等领域大显身手。