英文题目:Bridging hard and soft: Mechanical metamaterials enable rigid torque transmission in soft robots
中文题目:刚柔连接:机械超材料让软体机器人也能传递刚性扭矩
作者:Molly Carton, Jakub F. Kowalewski, Jiani Guo, Jacob F. Alpert, Aman Garg, Daniel Revier, Jeffrey Ian Lipton(通讯)
作者单位:美国华盛顿大学、英国剑桥大学、德国马克斯·普朗克智能系统研究所
期刊:Science Robotics
发表时间:2025年3月19日
链接:https://www.science.org/doi/10.1126/scirobotics.ads0548
引文格式:Carton M, Kowalewski J F, Guo J, et al. Bridging hard and soft: Mechanical metamaterials enable rigid torque transmission in soft robots[J]. Science Robotics, 2025, 10: eads0548.
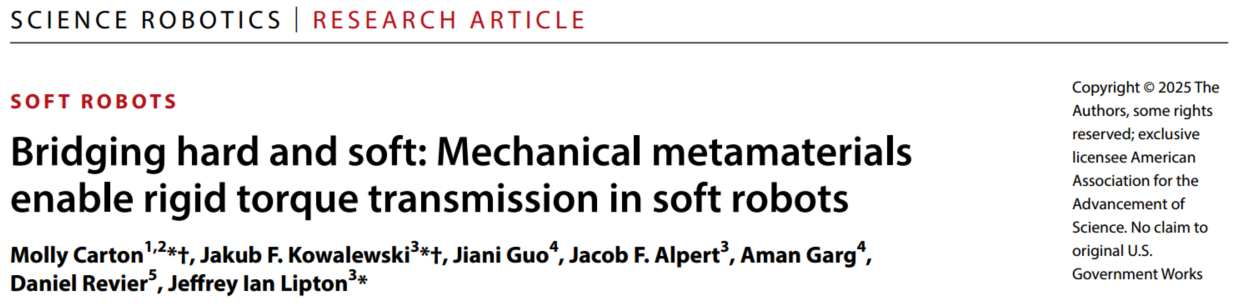
01 全文速览软体机器人一直有个“软肋”:它们能安全地与人互动,也能灵巧地弯曲伸展,但就是没法像传统机器人那样持续传递扭矩——拧个螺丝、转个阀门都费劲。
华盛顿大学领衔的研究团队这回带来了一个巧妙的解决方案。他们设计了一种叫 TRUNC( torsional rigid universal coupling,抗扭刚性万向接头) 的机械超材料结构,既能让机器人像大象鼻子一样柔软弯曲,又能像刚性轴一样传递扭矩。用这种材料造的机器人手臂,弯曲角度可达45°,扭矩传递效率高达85.7%,还能在弯曲状态下稳稳地把灯泡拧亮、把螺栓拧紧。
核心亮点:
✅ 刚柔并济:抗扭刚度是抗弯刚度的52倍,该硬的时候硬,该软的时候软
✅ 精准重复:轨迹跟踪重复性达0.4毫米和0.1°,超越现有软体手臂
✅ 多轴传动:可嵌套设计,能同时传递多个独立扭矩
✅ 安全协作:被动柔顺特性让人机协作更安全、更自然
02 研究内容🧩 设计理念:从植物茎秆到超材料
为什么软体机器人难以传递扭矩?根本原因在于材料本身——硅胶之类的软材料在扭转时也会变形。自然界给了启发:许多植物的茎秆通过几何结构实现高抗弯刚度与低抗扭刚度的配比,以适应风载。研究团队反其道而行之,追求高抗扭、低抗弯,通过机械超材料的几何设计来实现。
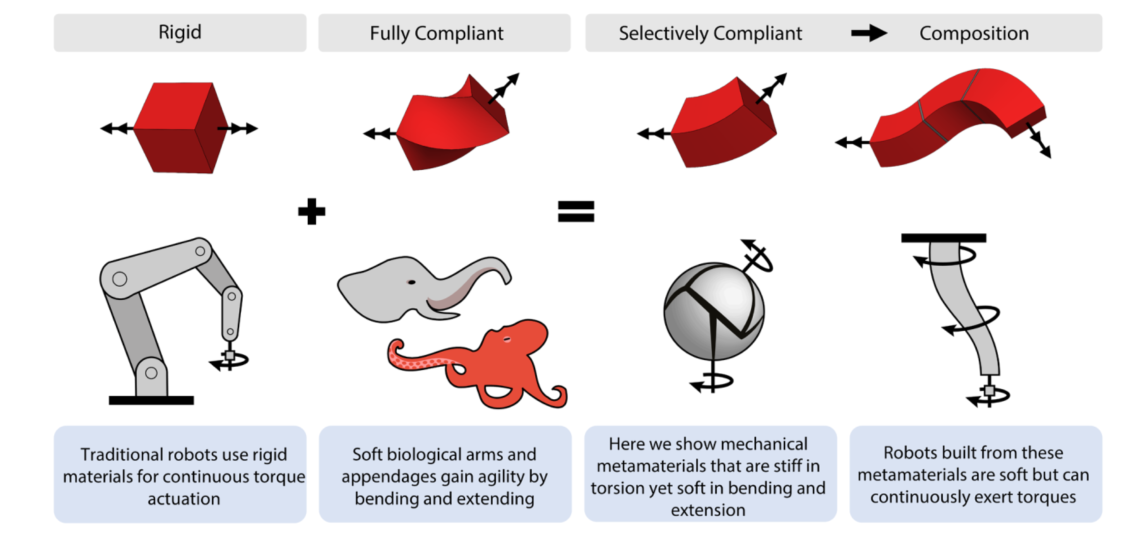
图 1. TRUNC 概念概述。我们提出了一种具有扭转刚性但能弯曲和伸展的接头。该关节可以直接连接到电机以创建软扭矩执行器。然后可以组合多个关节来创建具有连续扭矩驱动的软臂。
图中展示了TRUNC接头作为软性万向节的核心概念:既能弯曲,又能传递扭矩。
🔧 两种变体:赤道型与桁架型
研究团队基于轴向点群对称性,设计了两种TRUNC结构:
赤道型(M=2):结构简单,抗扭/抗弯刚度比约为11
桁架型(M=3):引入内部剪切自由度,抗扭/抗弯刚度比高达52
两种结构均采用弹簧钢(弹性模量高)或FPU 50树脂(3D打印)制造,通过激光切割和手工组装完成。
📊 性能测试:数据说话
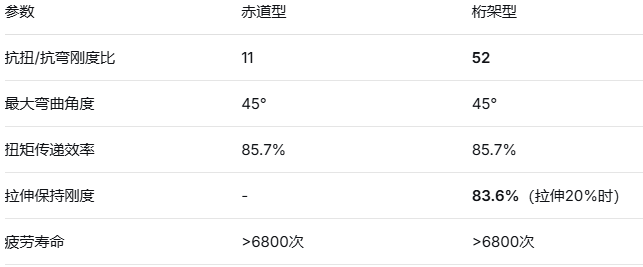
在实验中,一个桁架型TRUNC接头连上手电钻,即使在弯曲状态下也能稳稳地把螺丝拧进木头——这在传统软体机器人中是难以想象的。
图 2. 两种 TRUNC 变体和机械性能。 (A) 赤道 TRUNC 沿其赤道有单条关节带。比例尺,20 毫米。 (B) 桁架 TRUNC 在赤道两侧都有两个接头带。这种双重结构允许细胞内部产生剪切力,这在赤道结构中是不允许的。比例尺,20 毫米。与扭转相比,(C)赤道单元和(D)桁架单元的扭转和弯曲模式下的力矩旋转以及延伸时的力位移表现出较软的弯曲和延伸。 (E) 桁架 TRUNC 以不同的弯曲角度执行拧紧操作,展示弯曲时的扭矩传递。内部锥形弹簧提供恢复力。时间戳(分:秒)显示在每帧的左下角。
图中展示了接头在45°弯曲时仍能完成拧螺丝操作,左下角的时间戳显示了整个过程。
🔗 组合与嵌套:从接头到手臂
单个TRUNC接头已经很强,但真正的潜力在于组合:
串联:形成柔性传动轴,可沿曲线传递扭矩,同时还能拉伸(保持83.6%刚度)
嵌套:多个接头同心嵌套,彼此独立旋转,互不干扰
串联+嵌套:打造能同时传递多个独立扭矩的柔性传动轴
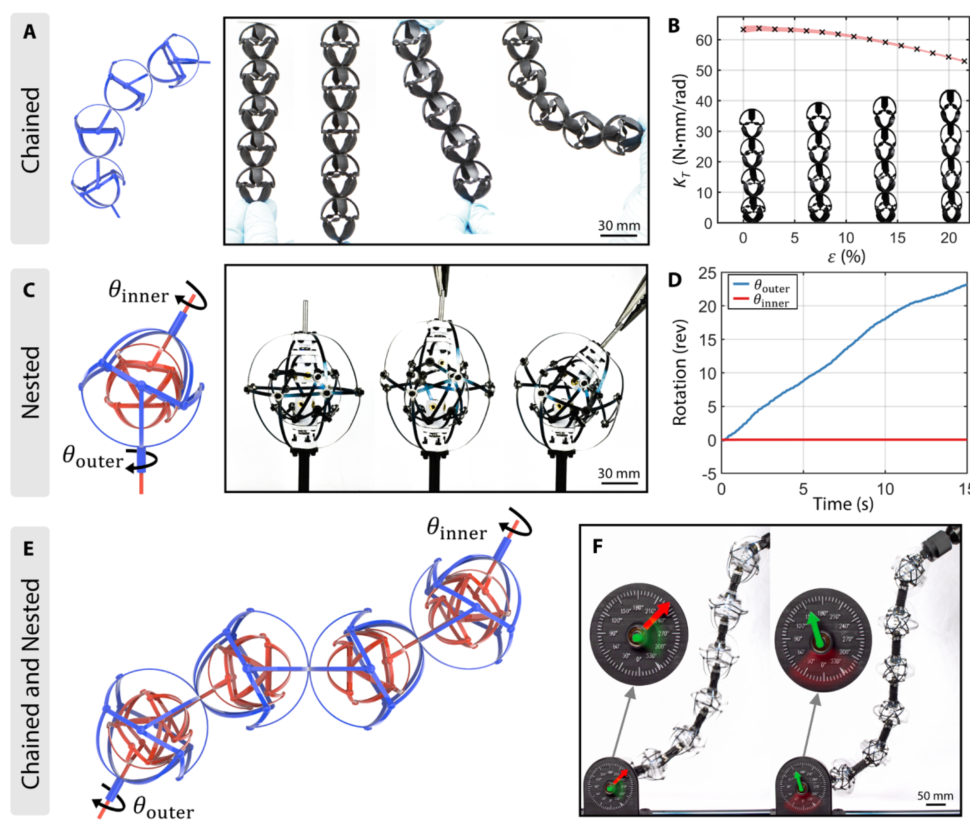
图 3. TRUNC 的组成。 (A) 关节可以串联起来形成柔性轴,在弯曲和伸展时传递扭矩。比例尺,30 毫米。 (B) TRUNC 柔性轴在延伸下保持扭转刚性。红色边界代表 n = 5 次试验的扭转刚度 KT 的最小和最大界限。 (C) 接头也可以同心嵌套。比例尺,30 毫米。嵌套关节在弯曲和伸展中耦合,但 (D) 独立旋转。 (E) 嵌套接头可以链接起来以创建传输多个扭矩的柔性轴。 (F) 柔性轴的每列单独旋转,允许多个独立的旋转自由度。比例尺,50 毫米。
图中展示了串联、嵌套以及串联+嵌套三种组合方式,以及独立控制内外两层旋转的演示。
🤖 整臂集成:电缆驱动+扭矩传动
研究团队将嵌套的TRUNC结构整合成一整条软体机器人手臂:
扭矩传动:底座安装一个直流电机,通过内侧的桁架型TRUNC轴将扭矩直接传递到末端执行器
姿态控制:外侧的赤道型TRUNC轴用于引导9根驱动电缆,由9个舵机控制,实现三维弯曲和伸缩
回复力:内部锥形弹簧提供轴向回复力,外部拉伸弹簧提供弯曲回复力
末端工具:可更换,本次演示用了万向套筒扳手
🎯 工作空间与重复性
通过实测18,300个位姿,研究团队绘制了手臂的工作空间:
工作空间体积:18,272 cm³
最大倾斜角:83.9°
最大压缩量:94.3 mm(原长的13.3%)
点定位重复性:标准差2.1 mm / 0.1°
轨迹跟踪重复性:标准差0.4 mm / 0.1°(超越现有软体手臂)
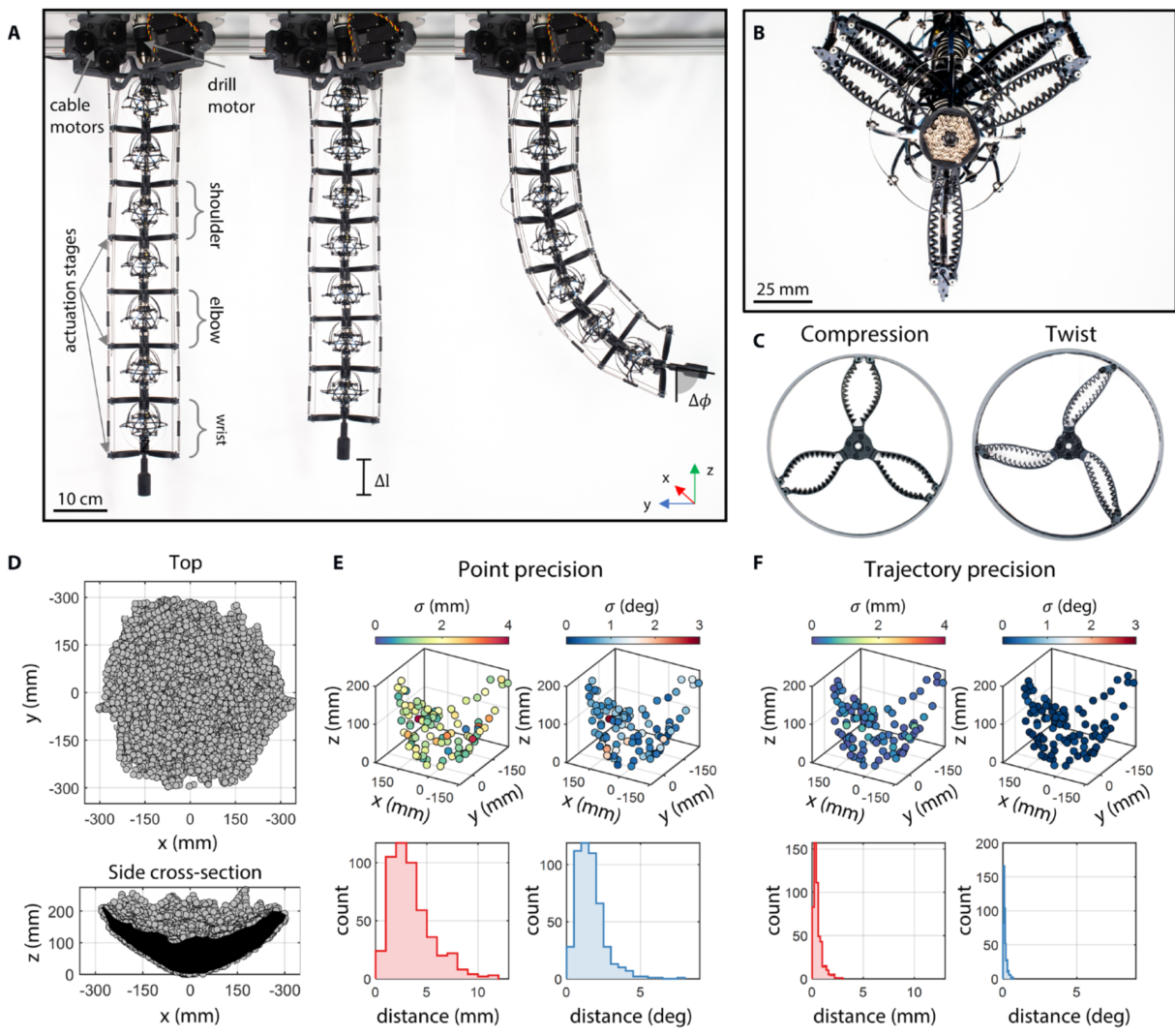
图4. TRUNC臂的设计与分析。 (A) 机械臂的主体由两个嵌套的柔性轴组成。使用安装在底座上的钻孔电机将扭矩传输到末端执行器。比例尺,10 厘米。 (B) 带有套筒驱动器末端执行器的手臂的正面视图。比例尺,25 毫米。 (C) 电缆通过一种结构连接,该结构可以在平面内弯曲和扭曲,但可以抵抗平面外弯曲。 (D) 工作空间是通过采样 18,300 个姿势进行经验测量的。边界外壳是凹形的并且关于 z 轴近似对称。横截面图显示了手臂如何通过沿其长度延伸来增加其工作空间体积。 (E) 以随机顺序(点精度)和 (F) 固定顺序(轨迹精度)访问点时手臂的位置和角度重复性。标绘点代表 n = 5 次试验的平均值,彩色图是 SD。
图中展示了三维工作空间的点云分布、不同截面的形状,以及重复性测试的统计结果。
🌍 应用演示:三个真实场景
为了验证实用性,研究团队用训练好的逆运动学神经网络(训练时间120.6秒,推理时间0.368毫秒/点),让手臂完成了三项任务:
1. 安装灯泡(图5A)
末端工具:市售灯泡更换器
关键动作:对准、插入、旋转2.5圈、点亮、退出
亮点:被动柔顺帮助对准,可增加插入力确保螺纹咬合
2. 人机协作安装主板(图5B)
末端工具:万向套筒扳手
关键动作:机器人拧紧M6螺栓(各7.5圈),人同时安装内存条
亮点:弹簧销设计解耦了旋转与伸缩,人机可安全并行工作
3. 狭小空间内关阀门(图5C)
末端工具:3D打印扳手
关键动作:弯曲伸入、套住阀门、旋转3.5圈关断气流
亮点:被动变形补偿轴线偏差,连续旋转无需重新抓取
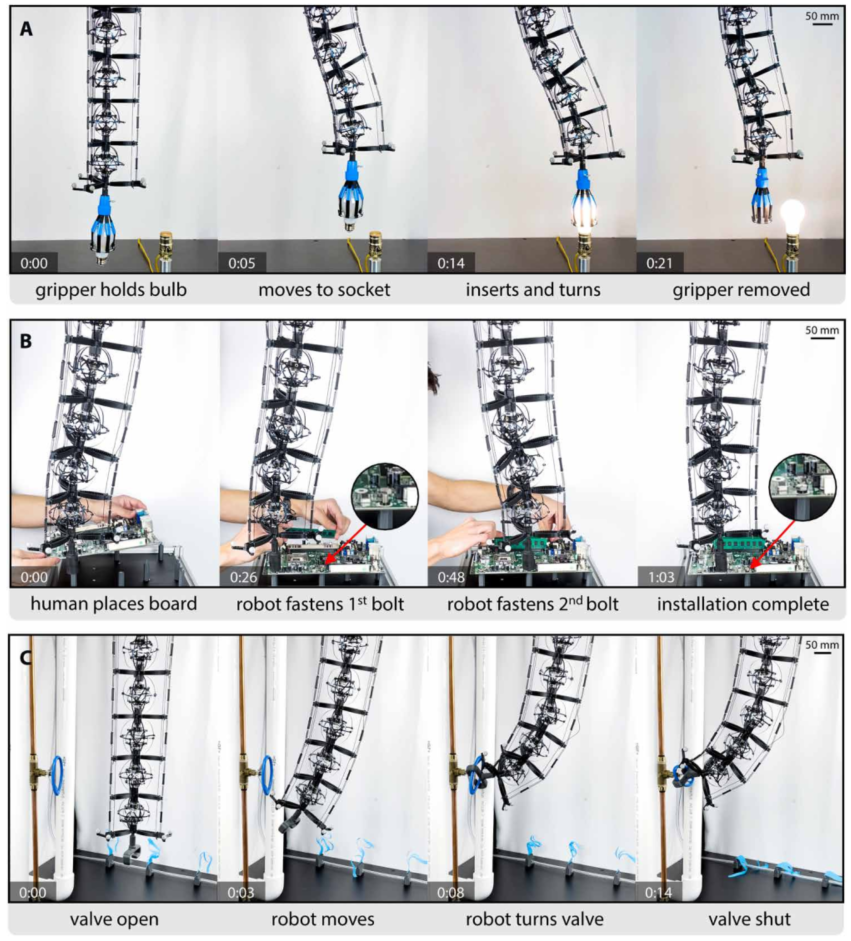
图 5. 演示 TRUNC 臂的应用。 (A) 将灯泡巧妙地安装到灯中。手臂定位灯泡,然后旋转它,直到灯泡打开。比例尺,50 毫米。 (B) 主板安装的安全人机协作。机器人通过紧固螺栓将电路板固定在框架上,而人类则安装计算机内存模块。比例尺,50 毫米。 (C) 操纵位于两个塑料管之间的阀门来关闭气流。比例尺,50 毫米。时间戳(分:秒)显示在每帧的左下角。
图中展示了手臂在不同场景下的操作过程,左下角的时间戳显示了实际用时。
03 创新点① 刚柔并济的结构设计理念
不是单纯追求更软,而是通过几何设计实现模式选择性刚度——在需要的方向上硬(扭转),在不需要的方向上软(弯曲、拉伸)。这种设计思路有望推广到更多软体机器人应用。
② 基于点群对称性的机械超材料
首次将轴向点群对称性引入软体机器人设计,用数学对称性指导结构生成,创造出既满足刚度配比又可无限组合的超材料单元。
③ 多自由度扭矩传动能力
通过串联+嵌套的组合方式,实现了在柔性弯曲状态下同时传递多个独立扭矩——这在传统柔性传动轴(只能传一个扭矩)和波纹管(弯曲范围小)中都做不到。
④ 高精度运动控制
尽管结构高度柔性,但通过数据驱动的方法(神经网络学习逆运动学),实现了0.4毫米的轨迹跟踪重复性,超越现有软体多段手臂。这表明柔性与精度可以兼得。
⑤ 生物力学验证平台
验证了植物茎秆中“刚度配比”策略在工程中的可行性,也为研究生物柔性结构的力学优化提供了新的物理模型。
04 总结与展望
本研究提出并验证了一种基于机械超材料的软体机器人手臂,首次实现了在柔性弯曲状态下连续传递扭矩的核心能力。通过TRUNC结构的设计,手臂的抗扭刚度达到抗弯刚度的52倍,同时保持45°的弯曲范围和13.3%的伸缩能力。在真实场景中,手臂成功完成了安装灯泡、拧螺栓、关阀门等任务,展示了从实验室走向实际应用的潜力。
未来研究将聚焦于以下几个方向:
🔸 感知与反馈集成:在结构中嵌入柔性传感器,实现闭环控制,进一步提高操作精度和适应性。
🔸 更复杂的多臂协同:利用多根TRUNC手臂协同工作,完成更复杂的装配、维护任务。
🔸 材料与制造工艺优化:探索更多高性能材料(如碳纤维复合材料)和增材制造工艺,提高结构的强度、寿命和可制造性。
🔸 小型化与微型化:将TRUNC结构缩小到毫米甚至微米尺度,探索在微创手术、微装配等领域的应用。
🔸 自主能源与计算:集成微型电池和机载计算单元,摆脱外部电源和计算机的限制,实现真正的自主操作。
🔸 学习与控制算法升级:开发更高效的逆运动学求解算法和运动规划方法,让手臂能实时适应动态变化的环境。
从模仿章鱼、象鼻到借鉴植物茎秆,软体机器人正在从“软”走向“刚柔并济”。这款TRUNC手臂不仅桥接了刚性与柔性,更打开了一扇新的大门——未来,我们或许能看到更多既安全又实用的机器人,真正走进我们的生活和工作。