理想发布新一代自动驾驶大模型
今天,理想汽车在NVIDIA GTC 2026发布下一代自动驾驶基础模型MindVLA-o1,该模型通过五大技术创新构建面向物理世界智能的自动驾驶基础模型,实现看得更远、想得更深等核心能力,更是向具身智能通用模型迈出关键一步,其基座模型负责人詹锟表示,该模型正演化为物理世界通用智能体,自动驾驶仅是物理AI起点。
理想辅助驾驶技术历经多年迭代,2024年端到端+VLM双系统架构量产,2025年VLA司机大模型随车型落地并全量推送,截至2025年底,该大模型月使用率80%,VLA指令累计超1225万次,春节期间辅助驾驶总里程达2.5亿公里,这些数据正式这项模型升级的技术基础。
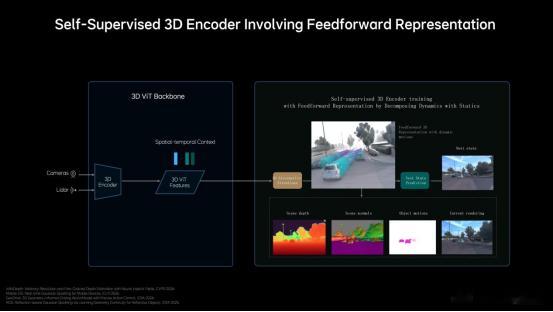
MindVLA-o1以原生多模态MoE Transformer为核心,五大创新各有侧重:3D空间理解融合视觉与激光雷达数据,实现高质量3D场景表示;
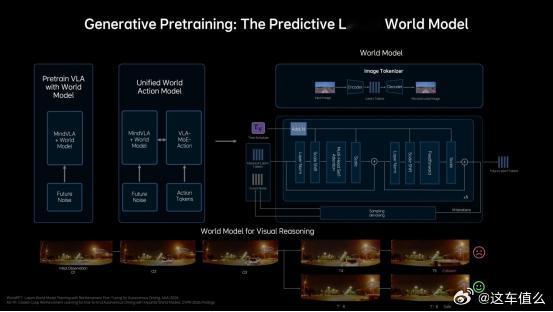
多模态思考依托预测式隐世界模型,让模型能推演未来场景;
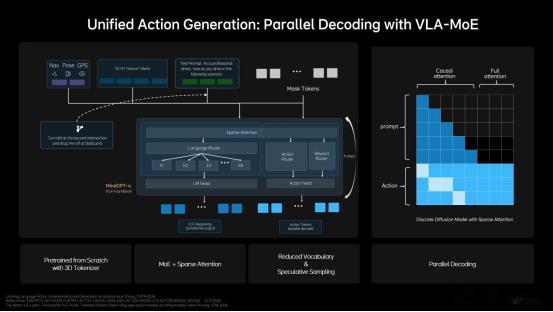
统一行为生成通过专属架构与优化技术,生成稳定合规的驾驶轨迹;
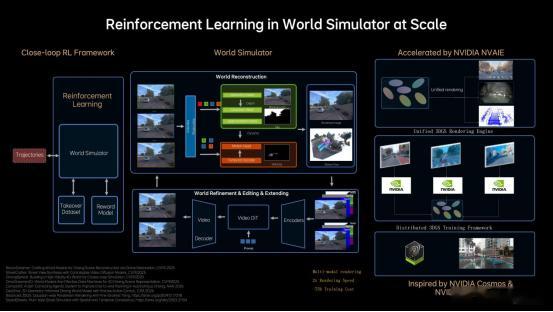
闭环强化学习借助高效场景重建与渲染引擎,降低75%训练成本,实现模型快速进化;
软硬件协同设计通过建模与多架构验证,大幅缩短端侧部署时间。
该模型是理想物理世界智能核心AI框架的关键部分,框架含MindData、MindVLA-o1、MindSim、RL Infra四大模块,形成感知、理解、行动、优化的完整闭环,可拓展至机器人等物理系统。
车是最大号的机器人,其本质是构建硅基生命体的躯干与大脑。目前,MindVLA-o1相关论文已登上多个国际AI顶会,未来理想将持续自研核心技术,向全球领先具身智能企业迈进。
就是不知道什么时候可以上车呢,大家期待不
理想汽车