导远现在也成了机器人领域的核心供应商。
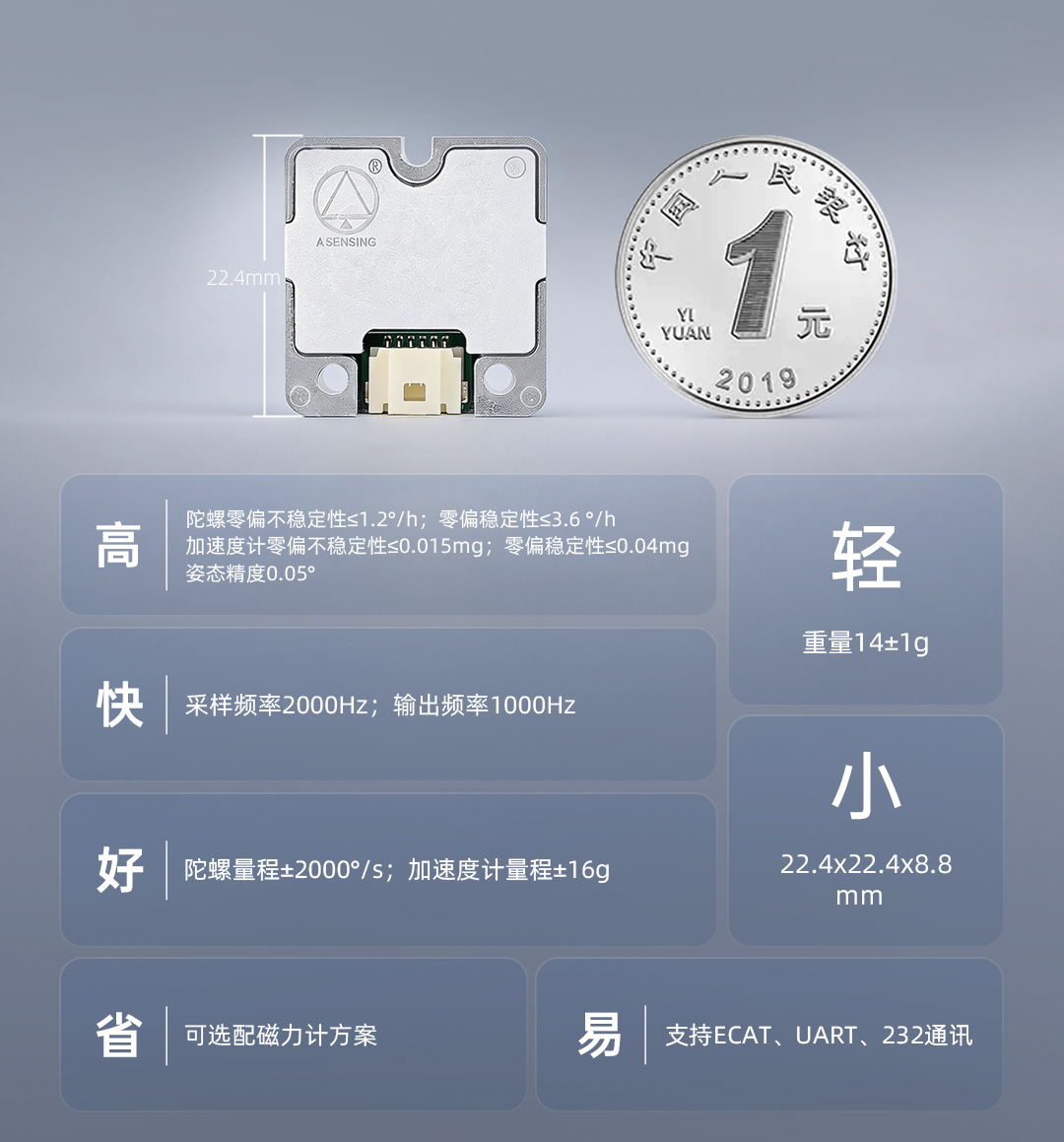
比如上过春晚的银河通用机器人,体内的惯性测量模组(IMU)就来自于导远。
为啥人形机器人也需要惯性测量呢?
这个问题其实挺有意思的。
核心原因是人形机器人要走路、要保持平衡就得用到这种车规级IMU。
典型如,现在人形机器人都会展示比较极限的动作,比如跑跳、甚至后空翻等等,那么就要求只有毫秒级的姿态反馈才能稳住身体不摔倒,就得用到IMU来输出姿态保证安全,而且机器人全身二十多个关机可以同时运动,还得能抗震抗冲击。
所以车规级IMU再次在人形机器人身上找到了市场。
只不过以前的自动驾驶IMU是用来做定位+导航的,但到了机器人身上是为了动态平衡和姿势控制的。
人形机器人银河通用